Figures & data
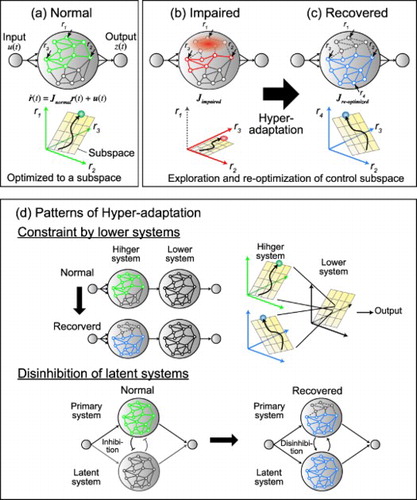
Figure 1. Schematic diagram of motor control. (a) Humans can choose appropriate motor commands under the cost function provided by the environmental and body dynamics. (b) When the brain is damaged, cost function is changed so that humans need to choose different motor strategies. (c) Rehabilitation intervention aims to reshape the cost function and encourage the individual to hyper-adapt to learn a new motion strategy.
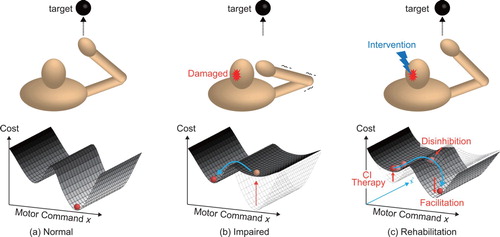
Table 1. Summary of weak and strong anticipation.
Figure 2. Block diagram of the ‘parallel’ system: internal dynamics condition the behavior of the body
such that it can be coupled with the target
and predict its output such that
. Green elements represent intrinsic elements of the body and target, while yellow elements are added to enable anticipation.
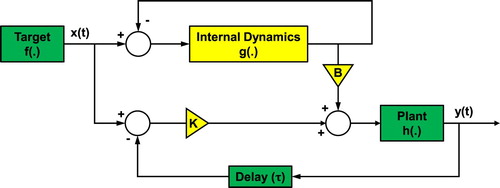
Figure 3. Schematic illustration of the parallel model based on anticipating synchronization. Environmental dynamics drives both internal dynamics and body dynamics. Internal dynamics with the feedback loops will reinforce the original motor commands. Note that the internal dynamics is not internal models of environmental or body dynamics, just a band of oscillators. We discussed the possibility of using recurrent neural networks (RNNs) as internal dynamics.
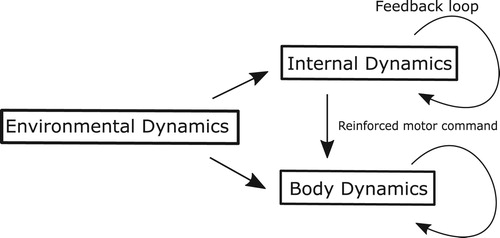
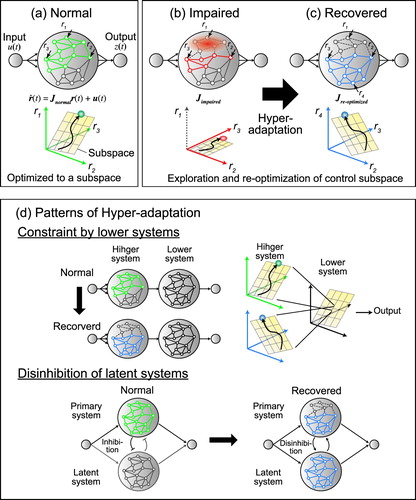
Figure 4. Schematic illustration of the network modeling of normal state and hyper-adaptability.