Figures & data
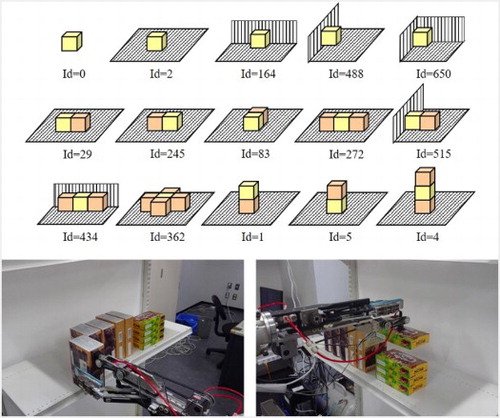
Figure 1. Non-prehensile manipulation may be performed for object picking according to the object arrangement pattern. (a) Tilting an aligned book for picking. (b) Sliding the top book for picking.
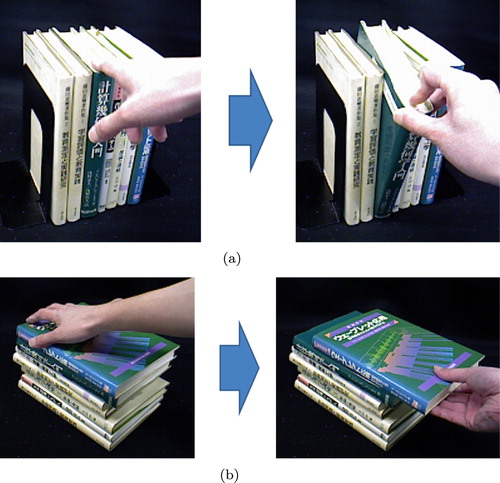
Figure 2. Two arrangement patterns of circular objects on a plane. (a) Arrangement pattern 1, (b) Arrangement pattern 2.
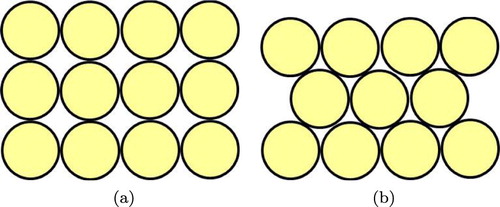
Figure 3. Labeling the faces of the object model. (a) The faces of the cuboid model and (b) the faces of the hexagonal prism model.
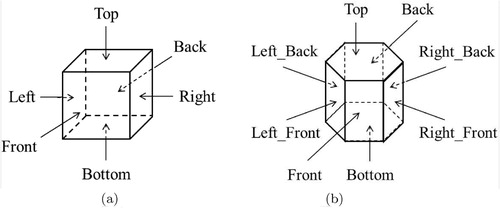
Figure 4. Sliding up an object while pressing it on the wall by gripper.
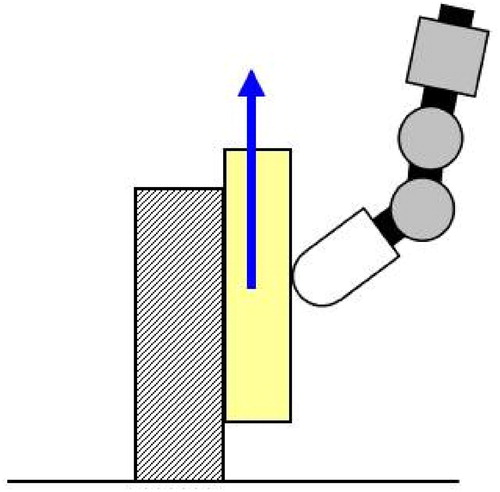
Figure 5. Representative object arrangement patterns of the cuboid model. The yellow cuboid is a target object, orange objects are moveable objects, and gray faces represent immovable objects.
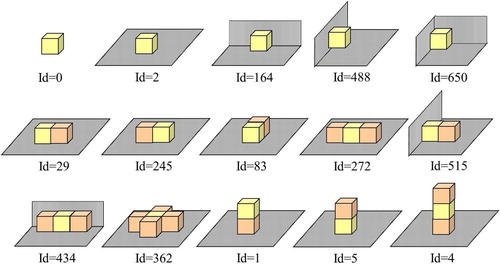
Figure 6. Object arrangement pattern in which part of the surfaces are occluded. (a) An object protruding from a desk and (b) middle object is the target object and is taller than the left and right objects, and the left object is taller than the right object.
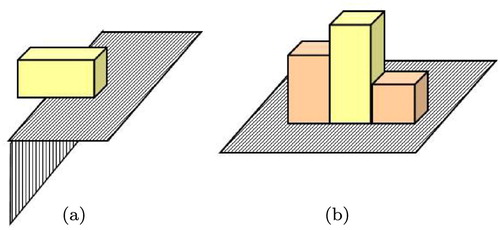
Figure 7. Three grasp patterns of a cuboid model when the object is grasped by a two-fingered gripper.
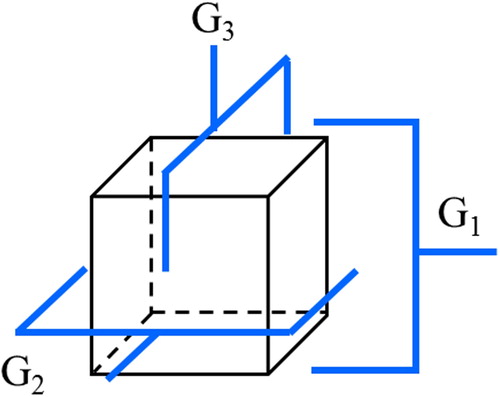
Figure 8. Non-prehensile manipulations to expose occluded grasp surfaces.
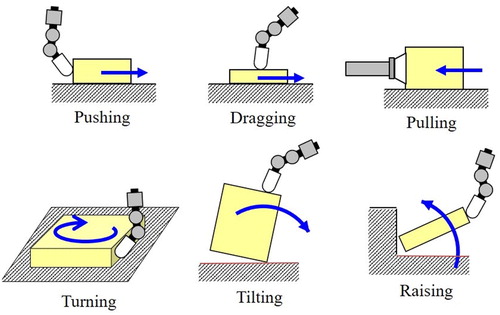
Figure 9. Overview of the object picking system.
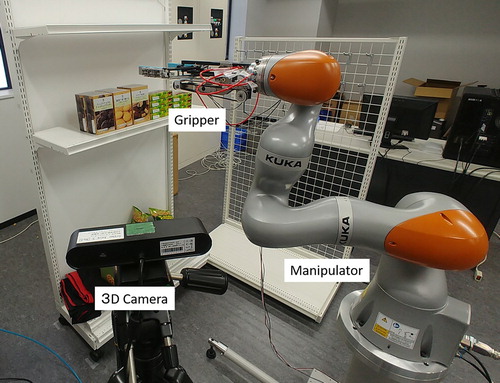
Figure 10. Objects arranged on a shelf.

Figure 11. Overview of the developed gripper.
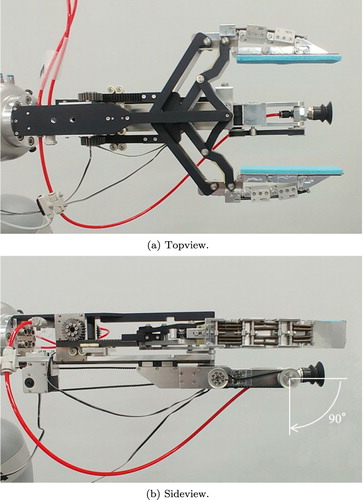
Figure 12. Basic actions of the suction gripper.
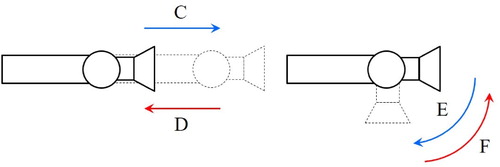
Figure 13. Grasping strategies of the gripper.
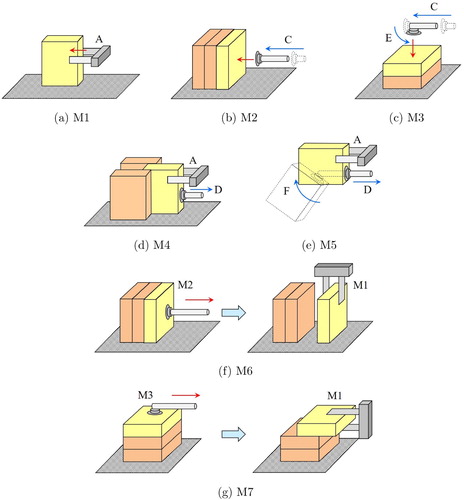
Figure 14. The object tilts when sucking the side of the object with the suction gripper.
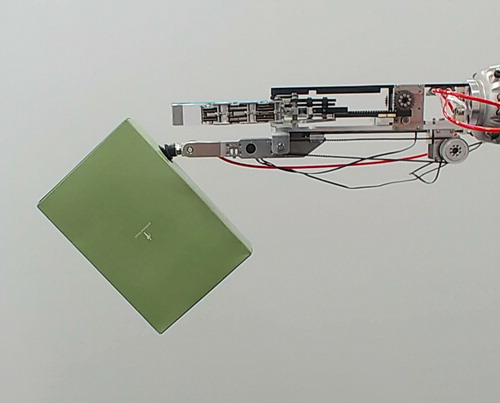
Figure 15. Recognition of the arranged objects and stacks. (a) Detection of the arranged objects and (b) recognition of the object arrangement.
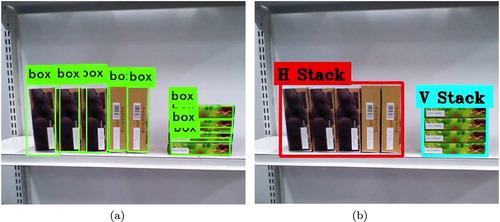
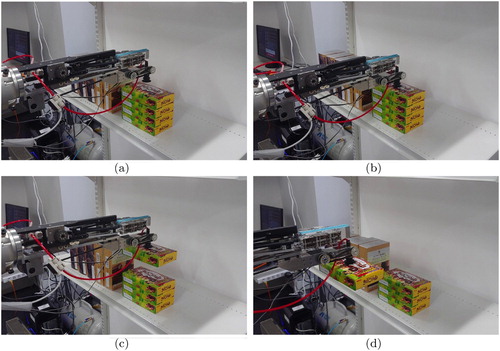
Figure 16. Picking an object from a horizontal stack using grasping strategy M4.
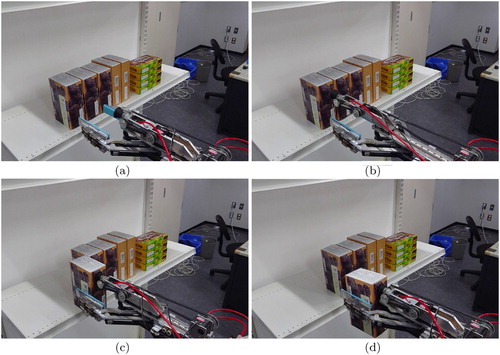
Figure 17. Picking an object from a vertical stack using grasping strategy M3.