

ABSTRACT
The availability of overhead views of the environments around mobile robots always present useful information provided that these views are correctly perceived. In this paper, a novel approach for vision-based path planning and obstacle avoidance for mobile robots is presented. The approach uses visual perception integrated with a proposed field-based path-planning algorithm to overcome some common path-planning issues such as local minima, problematic destinations, and following long paths around obstacles. An exponential angle field is generated around each obstacle that deviates from the robot’s orientation as it directs towards the destination. Obstacle field is activated or deactivated based on a proposed collision prediction algorithm. To satisfy robot convergence to the goal point, the obstacle field parameters are determined using the Lyapunov stability criterion. The method also proposes a search algorithm for proper exit in the case of robot and/or goal point trapping. Both simulation and experiments are used in validating the algorithm. The results show the effectiveness of the proposed algorithm in converging towards target points, avoiding collision with stationary obstacles and overcoming famous path-planning problems.
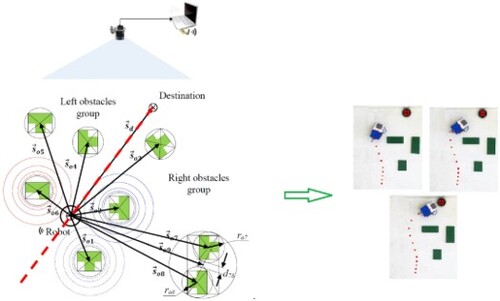
GRAPHICAL ABSTRACT
Disclosure statement
No potential conflict of interest was reported by the author(s).
Additional information
Notes on contributors
Mostafa A. Shoeib
Mostafa A. Shoeib earned his bachelor's degree in mechatronics and robotics engineering in 2013 from the Egyptian Russian University in Cairo. His master's degree in robotics and machine learning from the Arab Academy for Science, Technology and Maritime Transport (2018). With a passion for interdisciplinary research and application, Mostafa has experience in academia and industry, worked as a lecturer at Coventry University, Wroclaw, Poland, and has extensive experience working for leading industrial companies. He is currently a PhD student at Ain Shams University. His primary research interests lie in the convergence of machine learning, robotics, embedded systems, control, and power electronics. This multidisciplinary approach allows him to explore various aspects of intelligent autonomous systems, focusing on robot sensorimotor control and human-robot interaction. Mostafa is committed to advancing the field of robotics through innovative research and practical applications. He actively participates in international conferences and workshops, and his work has contributed to that field.
Jacek Lewandowski
Jacek Lewandowski received a Ph.D. degree in biomedical computing from Coventry University, Coventry, U.K., in 2014, an M.Sc. degree in software engineering from the Wroclaw University of Technology, Wroclaw, Poland, in 2011, and a B.Eng. degree in computer science from Coventry University, Coventry, U.K., in 2008. He is the campus director and an assistant professor at Coventry University Wroclaw. His research focuses on wireless sensor networks, IoT, cloud and fog computing, artificial intelligence as well as information and decision systems development for industrial, medical and life science applications. Dr Lewandowski has varied experience working in academia and industry. He is a member of several professional bodies including IEEE, IEEE Engineering in Medicine and Biology Society, or IADIS association. He has published several peer-reviewed papers, is a member of numerous conference program committees such as IEEE ICEBE or IEEE HealthCom and serves as a reviewer for several journal papers including, IEEE Journal of Translational Engineering in Health and Medicine, USA, IEEE Journal of Biomedical and Health Informatics, USA or Journal of Education Technology and Society, New Zealand mainly in the area of biomedical data processing, AI and cloud computing.
Ahmed M. Omara
Ahmed M. Omara received the B.Sc. and M.Sc. degrees in electrical engineering from Tanta University, Tanta, Egypt, in 2008 and 2013, respectively, and the Ph.D. degree in electrical engineering from Moscow Power Engineering Institute (MPEI), Moscow, Russia, in 2019. Ahmed's academic journey also included a stint as a scientific researcher visitor at the University of Western Ontario (UWO), Canada, in 2018. He received a specialized diploma in embedded systems from Information Technology Institute (ITI) in 2010. He is currently an assistant professor with the electrical engineering department, Faculty of Engineering, Tanta University. His current research interests include electric vehicles, electrical machine control, power electronics, electric drives, and energy management systems.