
Figures & data
Figure 1: Half vehicle active suspension system components diagram
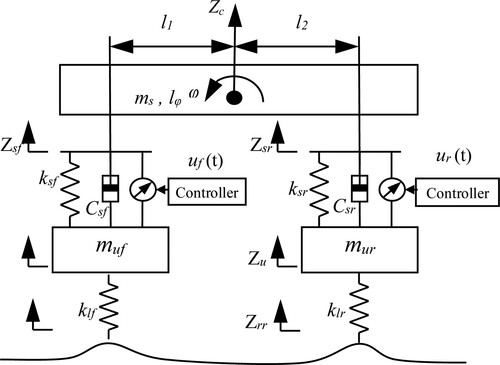
Table 1: Half-vehicle active suspension system variables and parameters
Figure 2: Ground velocities disturbances for the front (dashed line) and rear (solid line) wheels
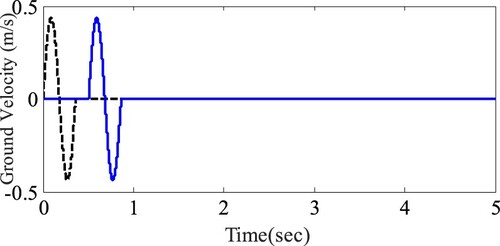
Figure 3: Changing between two modes of the controller
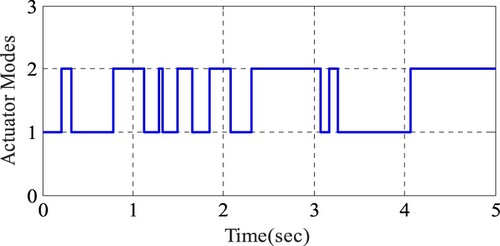
Figure 4: Controlled states of the system
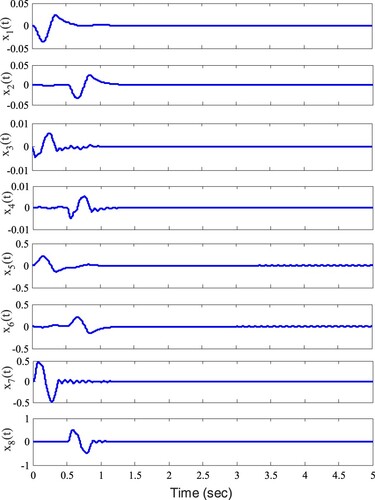
Figure 5: Controlled output z1(t) = [z11(t), z12(t)]
![Figure 5: Controlled output z1(t) = [z11(t), z12(t)]](/cms/asset/995e8f95-649f-4d22-8678-e2793c8d5730/tijr_a_1905083_f0005_oc.jpg)
Figure 6: Controlled outputs z2(t) = [z21(t), z22(t), z23(t), z24(t)]
![Figure 6: Controlled outputs z2(t) = [z21(t), z22(t), z23(t), z24(t)]](/cms/asset/c81e7a29-e8c6-420f-9362-8a89f3618c16/tijr_a_1905083_f0006_oc.jpg)
Figure 7: Control signal u(t) =[u1(t), u2(t)] of the system
![Figure 7: Control signal u(t) =[u1(t), u2(t)] of the system](/cms/asset/0c094609-f7f2-4d92-add7-45cf23081aab/tijr_a_1905083_f0007_oc.jpg)
Table 2: Parameters of simulated the active suspension system