Figures & data
Table 1. Capturing methods and ergonomic assessment measure.
Figure 1. Layered structure of the ErgoTakt approach.
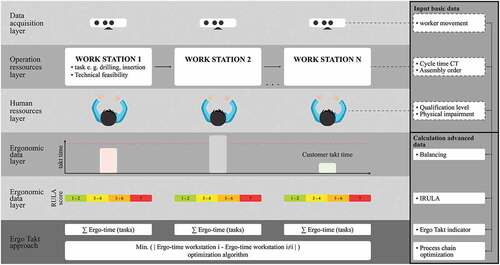
Figure 2. Scheme of the work preparation, data collection and optimization.
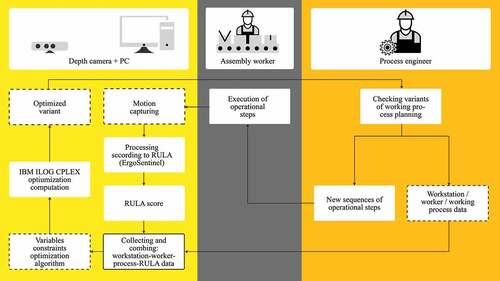
Figure 3. Virtual process chain with 9 manual assembly steps.
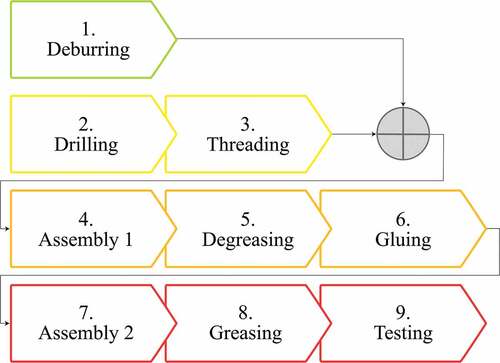
Table 2. Input data for the ErgoTakt algorithm.
Table 3. Categorized literature review gesture-controlled robotics.
Figure 4. Initial job assignment.
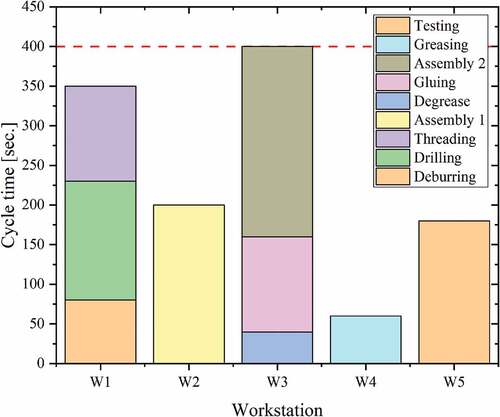
Figure 5. Cycle time balancing chart; (left) phase 1 optimization without ergonomic, (right) phase 2 ErgoTakt optimization (right).
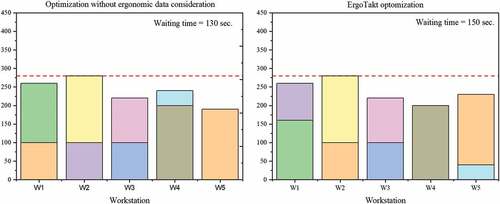
Figure 6. Architecture for cloud-based gesture control.
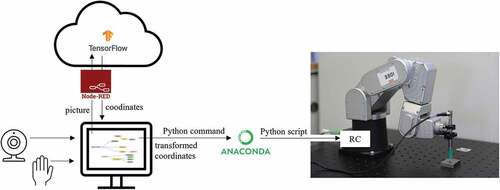
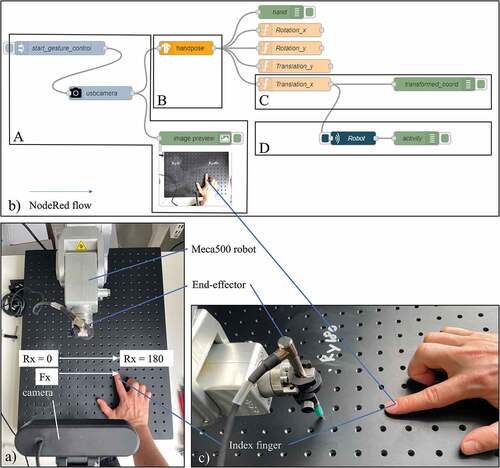
Figure 7. (a) top-view of the test bench with the MECA500 robot the camera; b) NodeRed flow and its direction; c) Resulting robot position after pointing a position with the index-finger.