Figures & data
Figure 1. Description of the mission.
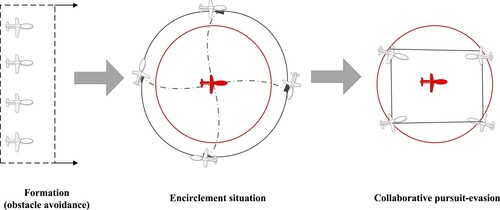
Figure 2. Apollonius circle.
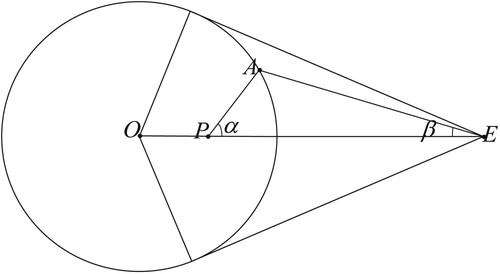
Figure 3. Position of the pursuer and the evader.
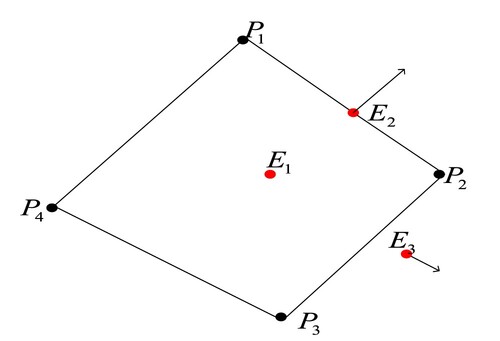
Figure 4. Unenclosed state.
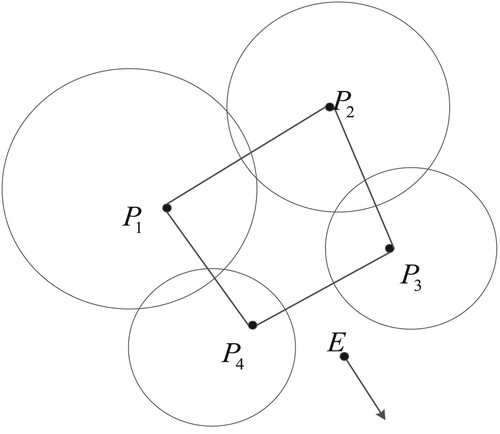
Figure 5. Semi-enclosed state.
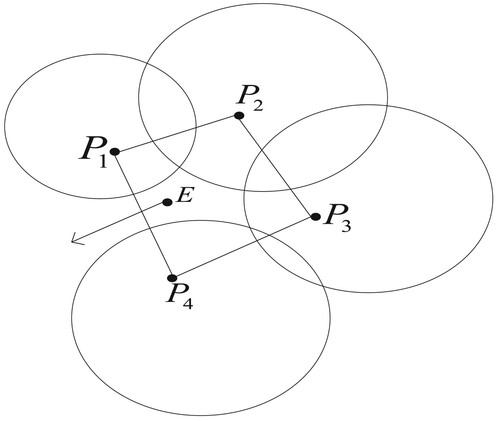
Figure 6. Fully enclosed state.
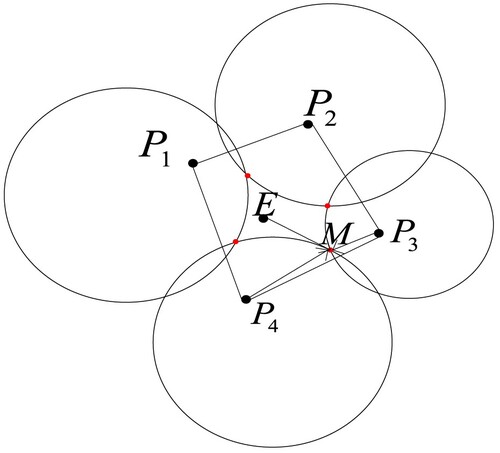
Figure 7. Strategy of the pursuers.
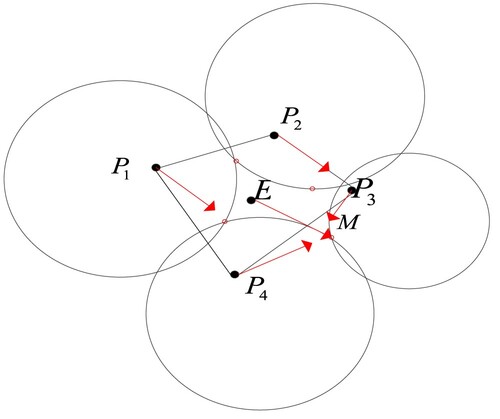
Figure 8. UAV obstacle avoidance diagram.
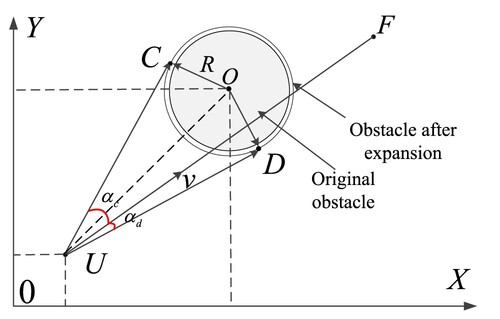
Figure 9. Turning angle of UAV.
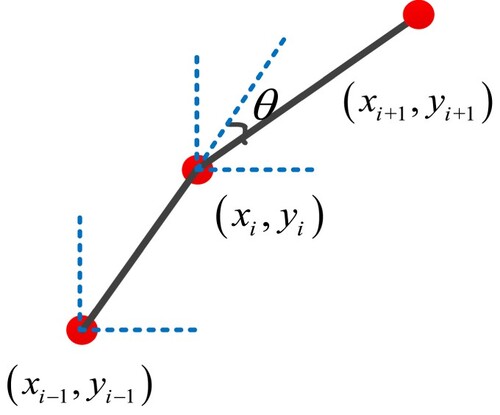
Figure 10. Flow chart of the pursuit-evasion strategy.
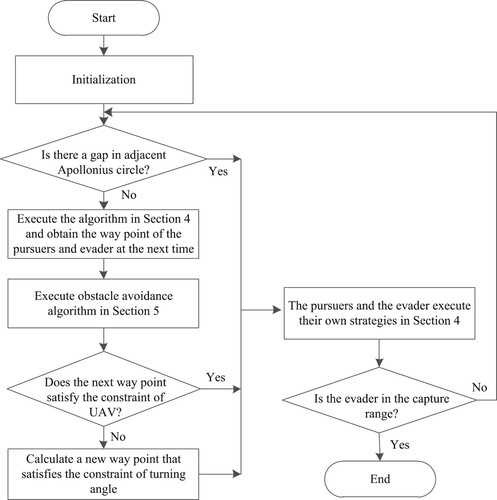
Figure 11. Encirclement process when the evader is stationary.
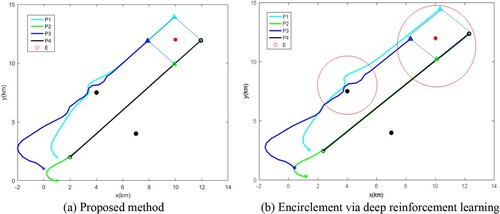
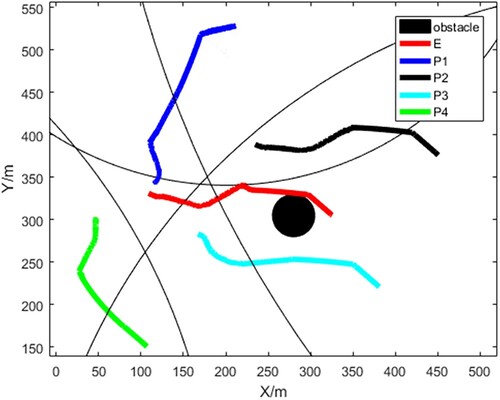
Figure 12. Encirclement process when the evader moves.
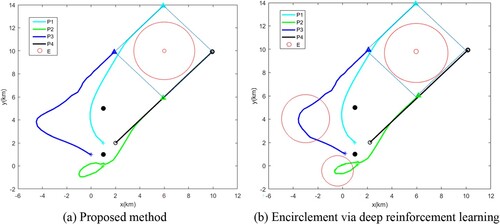
Figure 13. The evader escapes from the gap.
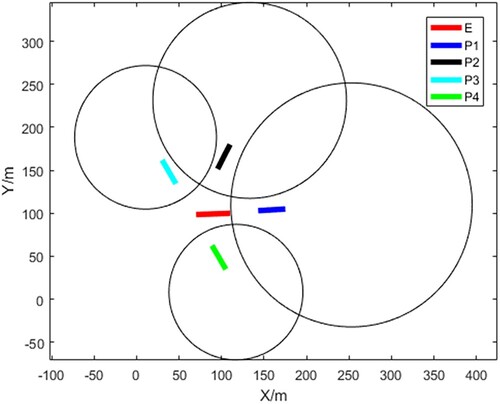
Figure 14. The evader is captured by the pursuers.
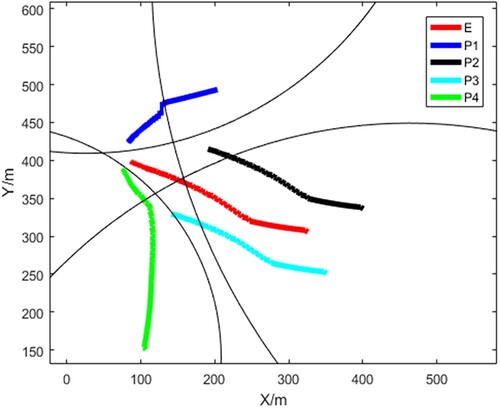
Table 1. Simulation results of different pursuer’s velocity.
Figure 15. Simulation results.
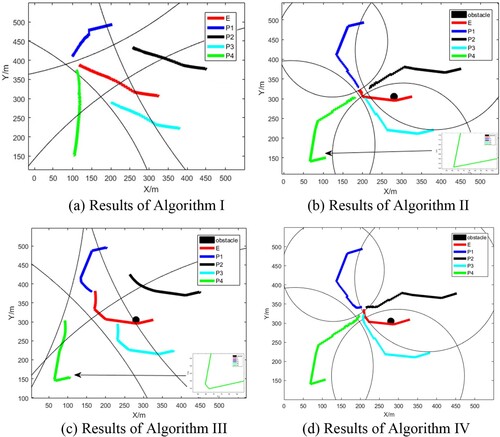
Table 2. Comparison of capture time of different algorithms.
Figure 16. Influence when the radius of obstacle is R=30m.