Figures & data
Table 1. Partial trajectory data sheet R.
Figure 1. Location data sheet creation process.

Figure 2. Filtering available locations.
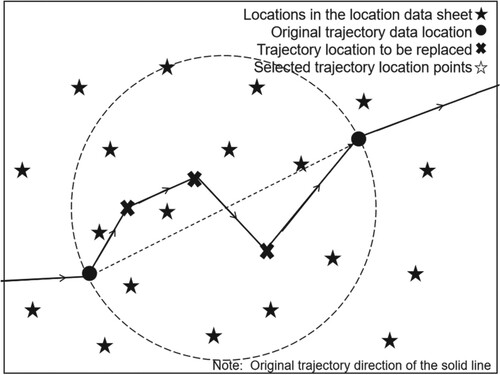
Figure 3. The filtered trajectory path.
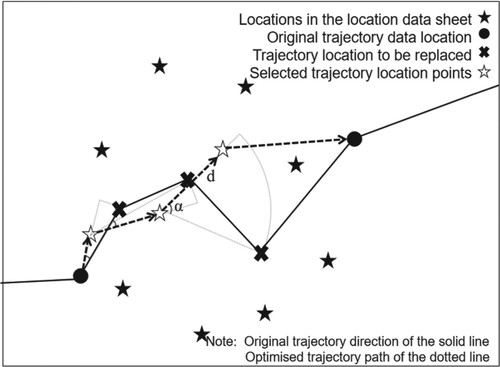
Table 2. Pseudocode for local optimisation.
Table 3. Pseudocode for constructing R-tree and adding noise.
Figure 4. Effect of different K values on the loss rate of trajectory data point.
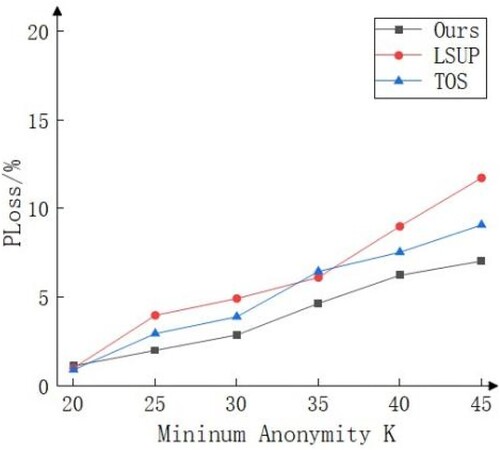
Figure 5. Effect of different C values on the loss rate of trajectory data points.
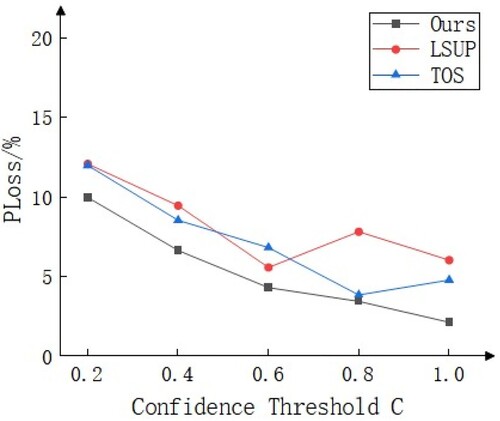
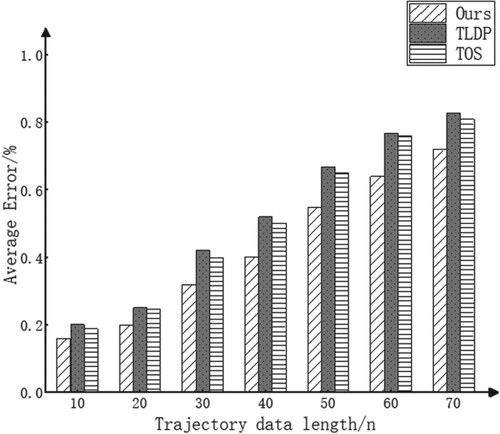
Figure 6. Comparison of the average error of different algorithms.
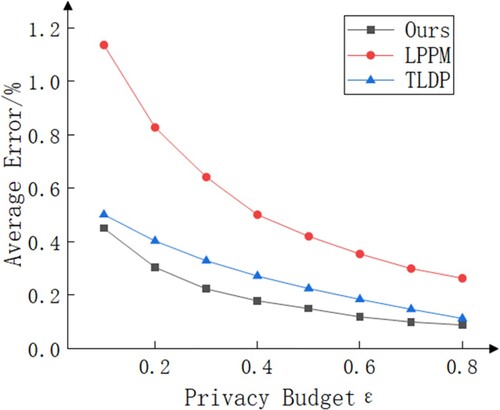
Figure 7. Comparison of the average data point quality loss results of different algorithms.
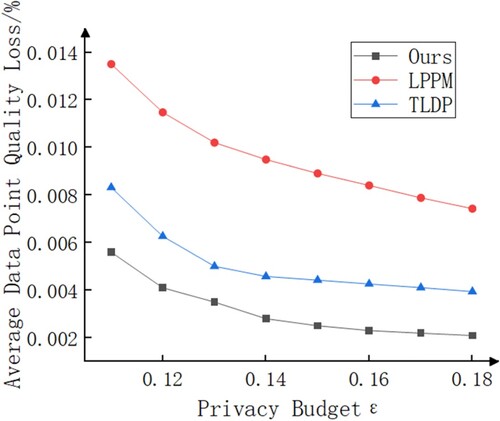
Figure 8. When ε = 0.5, effect of trajectory data length on different scenarios.
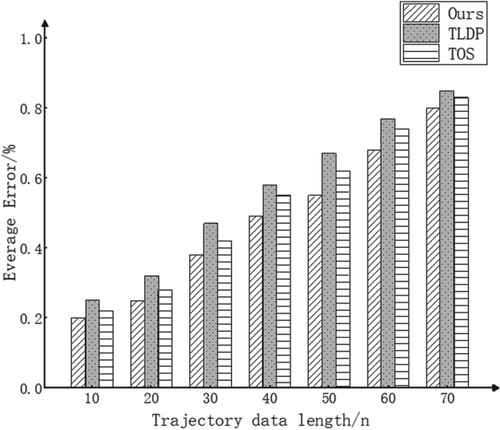
Figure 9. When ε = 1, effect of trajectory data length on different scenarios.