Figures & data
Table 1. Dividing the Bluetooth signal into categories.
Figure 2. Low variance resampling method (Thrun, Burgard, and Fox Citation2005).

Figure 14. Cumulative distribution function (CDF) of the position deviations for the X and Y-axis on the 4th floor.
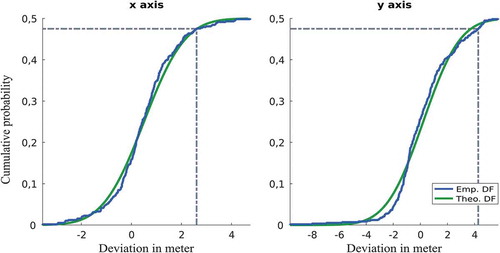
Figure 1. Concept for smartphone-based real-time indoor positioning for pedestrians.
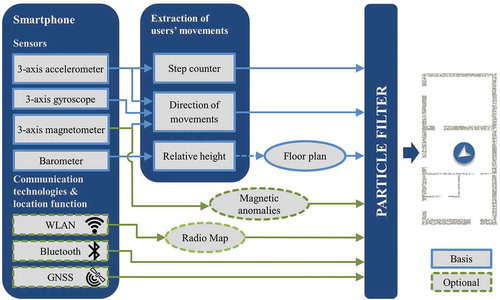
Figure 3. Example of Jordan point-in-polygon test.
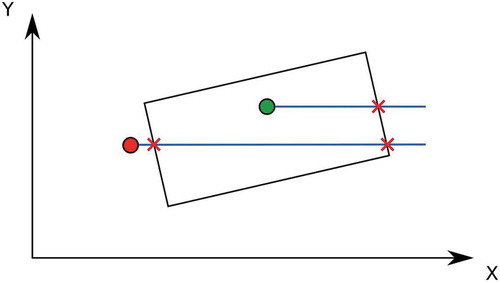
Figure 4. Empirical density function of the position deviations for the X and Y-axis on the 4th floor.
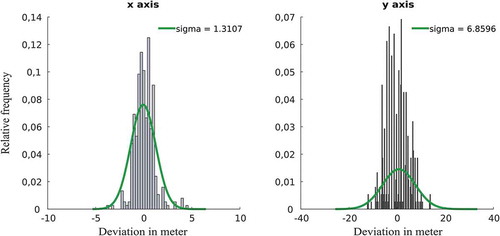
Figure 5. Cumulative distribution function (CDF) of the position deviations for the X and Y-axis on the 4th floor.
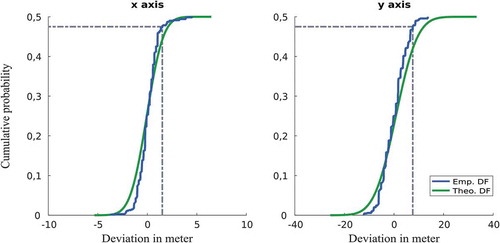
Figure 6. QQ plot of the position deviations for the X and Y axis on the 4th floor.
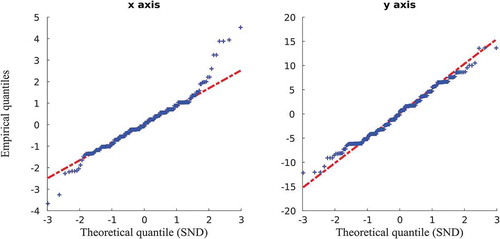
Figure 7. Limitation of the particles in the transmission range of the BLE beacons.
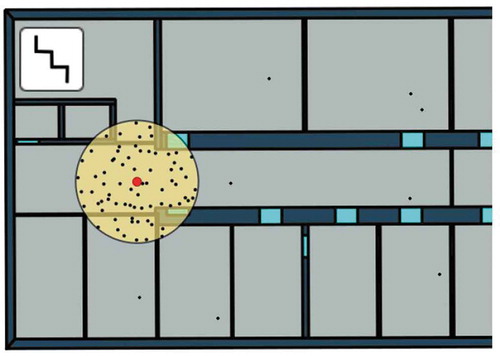
Figure 8. Schematic representation of the processes in the sensor service.
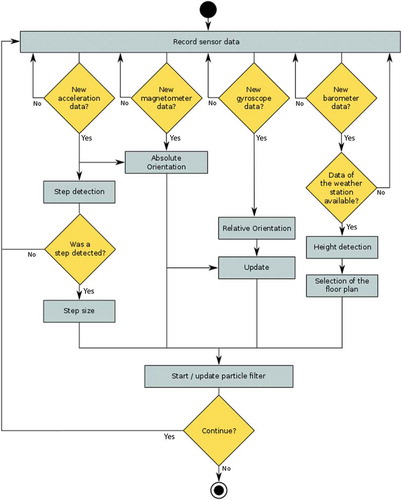
Figure 9. Developed application for the real-time indoor positioning.
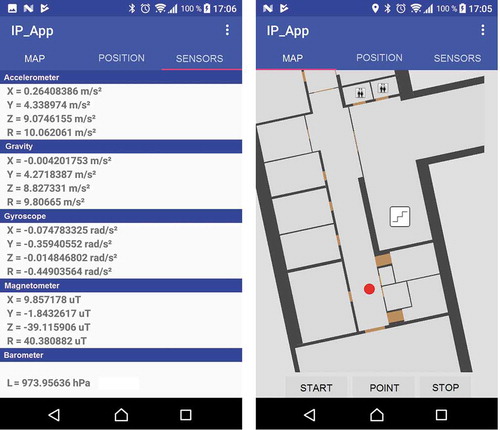
Figure 10. Behavior of the particle filter in a trial run without the integration of external IPS.
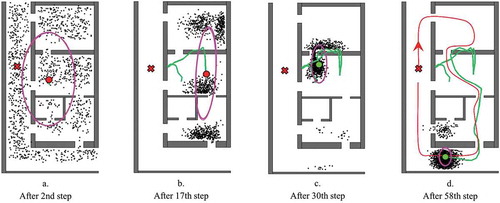
Figure 11. Fire doors cause local disturbances of the Earth’s magnetic field.
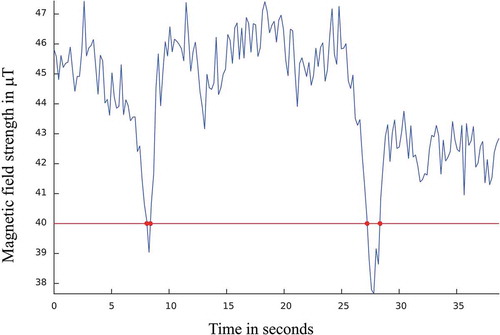
Figure 12. Visualization of the ground truth points on the fourth floor. The beacons are marked in blue.
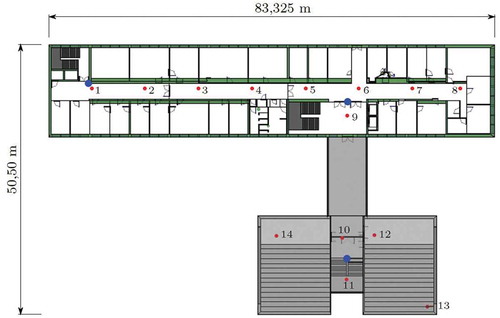
Figure 13. Empirical density function of the position deviations for the X and Y-axis on the 4th floor.
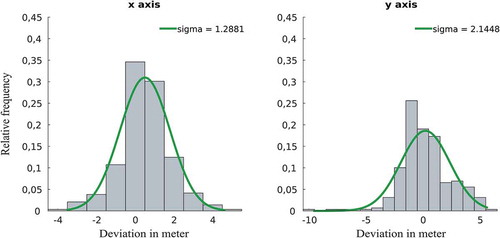
Figure 15. QQ plot of the position deviations for the X and Y axis on the 4th floor.
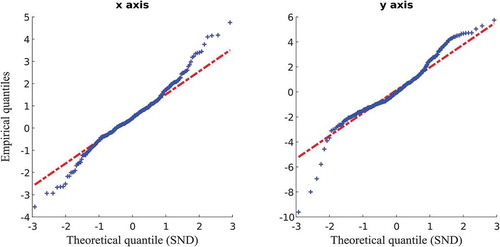
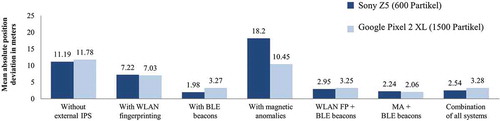
Figure 16. Total results of the position estimation with the smartphones Pixel 2 XL and Sony Z5 on the fourth floor.