
Figures & data
Figure 1. Point position uncertainty caused by scanning geometry.
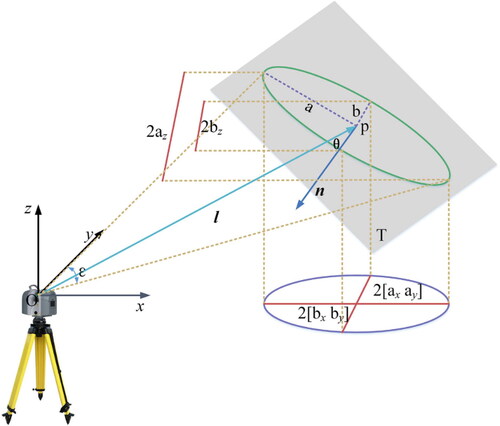
Figure 2. The position relationship between the and
coordinate systems.
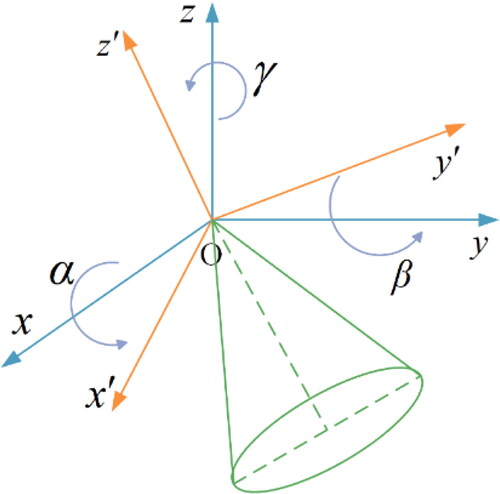
Figure 3. Adaptive projection point cloud comparison (AP-PCC) algorithm.
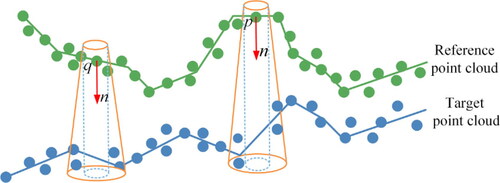
Figure 4. The study areas, (a) Combined regular geometry, (b) Landslides.
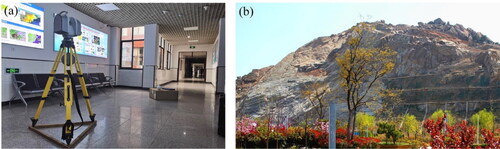
Table 1. Description of the datasets.
Figure 5. Point position uncertainty is related to scanning geometry, where the solid line with a different color in each subplot indicates the changing trend of the point position uncertainty with the laser incident angle, scanning distance and beam divergence, respectively.
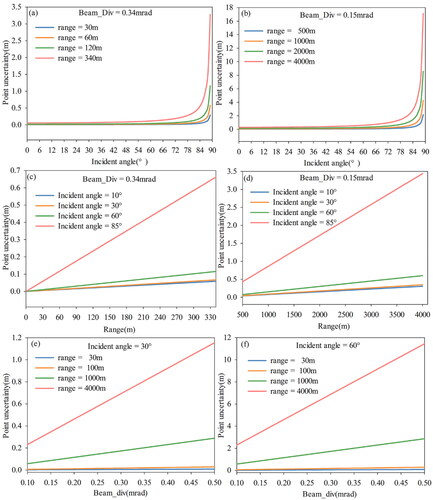
Figure 6. Point position uncertainty of the regular geometry point cloud, where (a) to (d) correspond to stations 1 to 4, respectively.
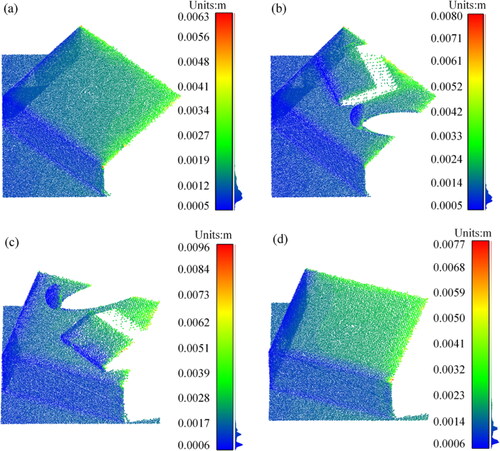
Figure 7. The roughness of the multitemporal point cloud, where (a) to (c) is the roughness of the first to the third temporal point cloud, respectively.
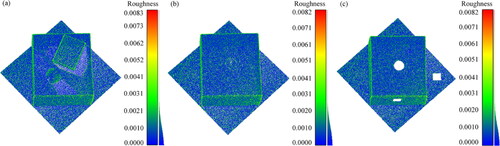
Figure 8. The deformation analysis results of the multitemporal point cloud. (a) and (b) are the deformation analysis results of the first and second temporal point cloud using the M3C2 algorithm, where the projection search depths are 16 cm and 20 cm, respectively; (c) and (d) are similar to (a) and (b), but using the AP-PCC algorithm; (e) and (f) is the deformation analysis results of the first and third temporal point cloud using the M3C2 and AP-PCC algorithm, respectively, the projection search depth of the latter is 20 cm.
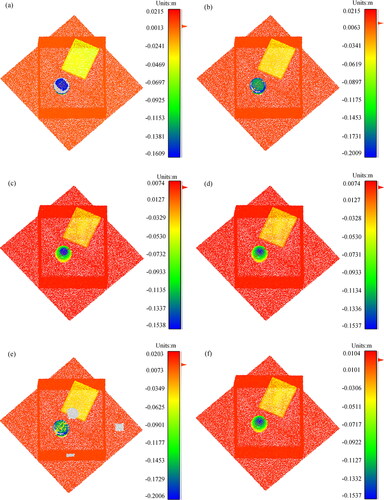
Figure 9. Deformation analysis results of the first and second temporal point cloud using different methods. (a) to (d) are the detection results of the C2C, C2M, M3C2 and AP-PCC methods, respectively.
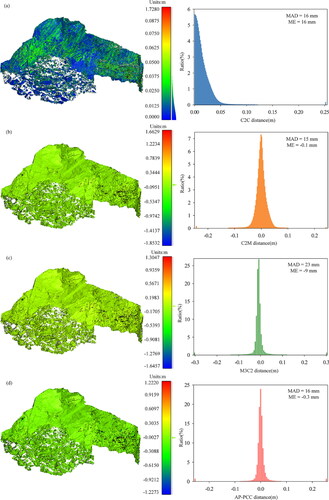
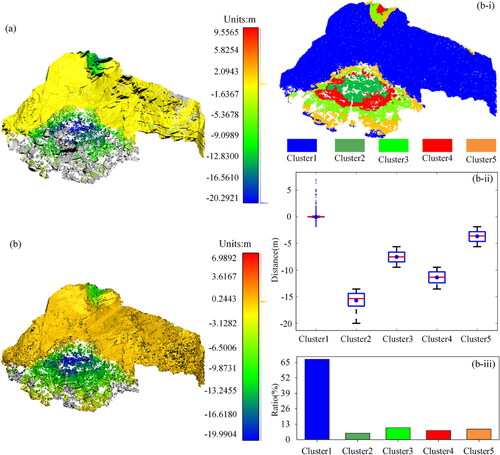
Figure 10. Deformation analysis results of the first and third landslide point cloud. (a) and (b) are the results using the M3C2 and AP-PCC methods, respectively; (b-i) cluster results; (b-ii) cluster distribution; (b-iii) point distribution.
Data availability
The data that support the findings of this study are available from the corresponding author upon reasonable request.