Figures & data
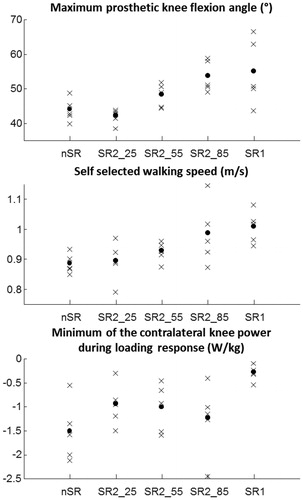
Figure 1. (A) Simplified state machine managing the comportment of the prosthesis. (B) Asymptomatic subject standing on the prosthesis using the orthosis.
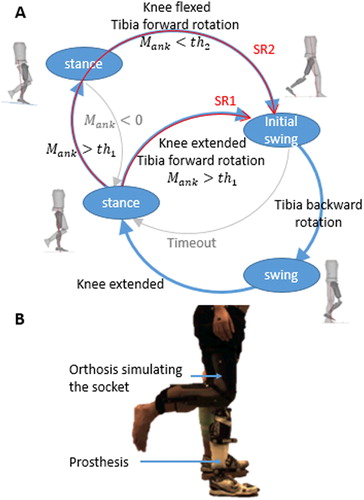
Table 1. Cases considered in this study.
Figure 2. Maximum prosthetic knee flexion angle (top), self-selected walking speed (middle) and minimum contralateral knee power during loading response (bottom). Each cross stands for a gait cycle. The dots represent the average for all the cycles.