Figures & data
Figure 1. Motorcycle data. Head acceleration in g (one g ≈ 9.8 m/s2) versus the time in milliseconds after impact.
Table 1. Summary of the simulation studies.
Figure 2. Top row: Simulation 1 (iid zis with p1=0.7). Bottom row: Simulation 2 (Markov zis with a12=0.3 and a21=0.4). Example of simulated data along with the initial and final estimates of f1 and f2 obtained using the Bayesian approach and the penalised log-likelihood approaches. The light-coloured dots correspond to z=2 and the dark-coloured dots to z=1. The solid lines correspond to the true functions f1 and f2, respectively. The dot-dashed lines are the initial estimates of f1 and f2 obtained using the function estimate method. The dashed lines are the final estimates of f1 and f2. See online version for colours.
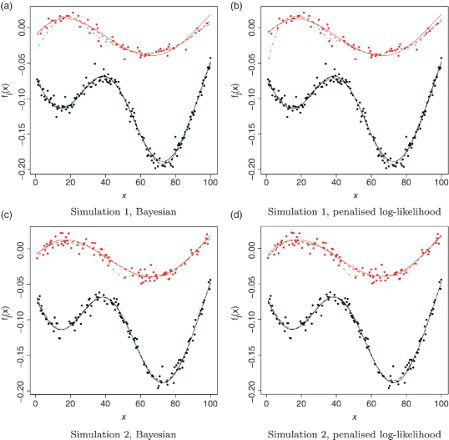
Figure 3. Simulation 3 (Markov zis with a12=0.1 and a21=0.2). Top row: Example of simulated data along with the initial and final estimates of f1 and f2. The light-coloured dots correspond to z=2 and the dark-coloured dots to z=1. The solid lines correspond to the true functions f1 and f2, respectively. The dot-dashed lines are the initial estimates of f1 and f2 obtained using the residual-based method. The dashed lines are the final estimates of f1 and f2. Bottom row: Example of simulated datasets along with initial estimates (dot-dashed lines) that yield (c) good and (d) bad final function estimates (dashed lines) using the Bayesian approach. See online version for colours.
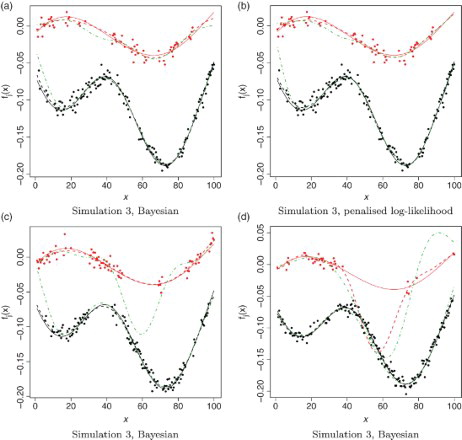
Figure 4. Top row: Simulation 1 (iid zis with p1=0.7). Bottom row: Simulation 3 (Markov zis with a12=0.1 and a21=0.2). EMSE of the final estimates of f1 and f2 using the Bayesian (dashed lines) and the penalised log-likelihood (solid lines) approaches.
Table 2. Number of simulated datasets with at least one value of pˆ(zi=1|yi)>0.2 when zi=2.
Table 3. Number of simulated datasets with at least one value of pˆ(zi=2|yi)>0.2 when zi=1.
Table 4. Estimates of σ2 (true value=5×10−5).
Table 5. Estimates of the parameters of the z process.
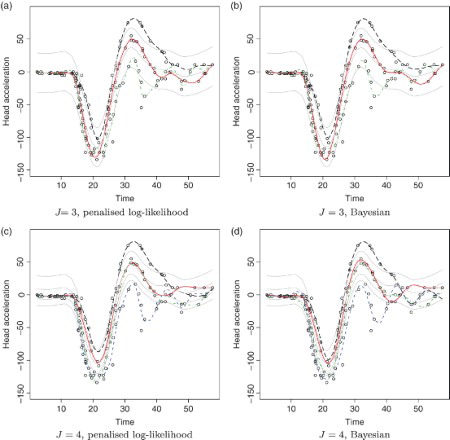
Figure 5. Motorcycle data. Top row: final function estimates obtained for J=3 using (a) the penalised log-likelihood approach and (b) the Bayesian approach. Bottom row: final function estimates obtained for J=4 using (c) the penalised log-likelihood approach and (d) the Bayesian approach. The thin light-coloured lines correspond to the initial function estimates, which are constant shifts of a smoothing spline fit to all the data. See online version for colours.