
Figures & data
Figure 1. Schematic diagram of the UAV structure.
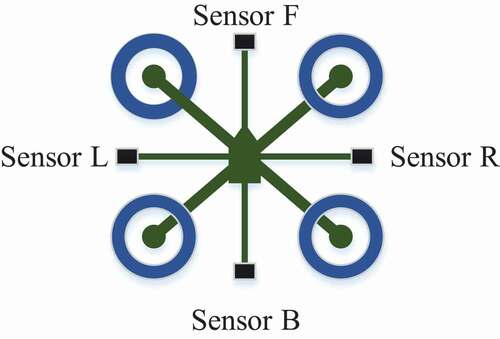
Figure 2. The input-output relationship of the fuzzy controller.
Figure 3. Membership function of the input “Front”.
Figure 4. Membership function of the output “Angle”.
Figure 5. Membership function of the output “Step”.
Table 1. The fuzzy control rule.
Figure 6. Pollutant diffusion simulation in an ideal environment.
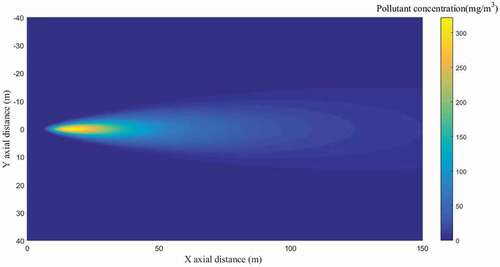
Table 2. Simulation parameters.
Figure 7. Pollutant diffusion simulation in a complex environment.
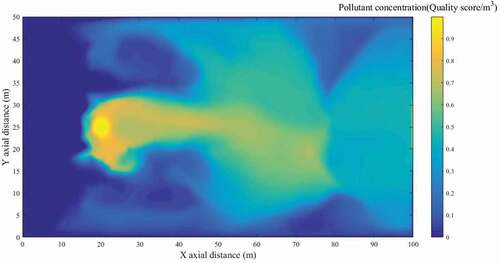
Table 3. Simulation parameters.
Figure 8. Trajectories of the FCT algorithm(left) and the ZigZag algorithm(right) obtained in the Gaussian concentration field.
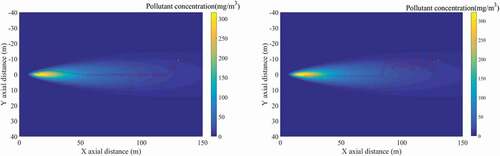
Figure 9. Tracing results of the FCT algorithm(left) and the ZigZag algorithm(right) under Gaussian environmental conditions with different wind speed.
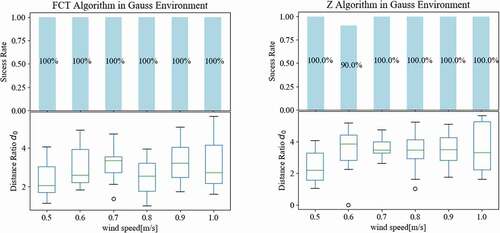
Figure 10. Tracing results of the FCT algorithm(left) and the ZigZag algorithm(right) under Gaussian environmental conditions with different gas release speeds.
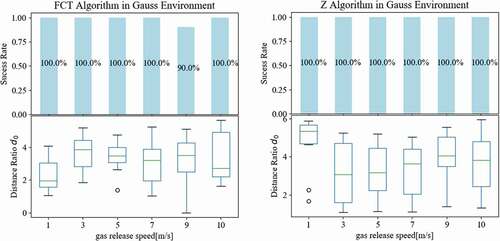
Figure 11. Trajectories of the FCT algorithm(left) and the ZigZag algorithm(right) obtained in the Gaussian concentration field.
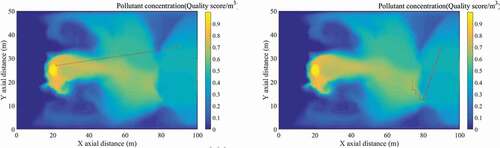
Figure 12. Tracing results of the FCT algorithm (left) and the ZigZag algorithm (right) in a complex environment with different wind speeds.
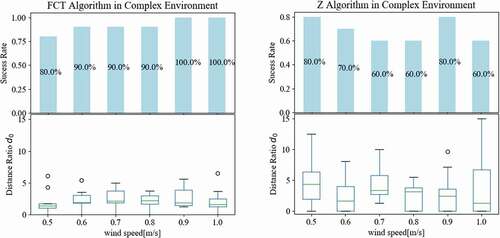
Figure 13. Tracing results of the FCT algorithm and the ZigZag algorithm in a complex environment with different gas release speed.
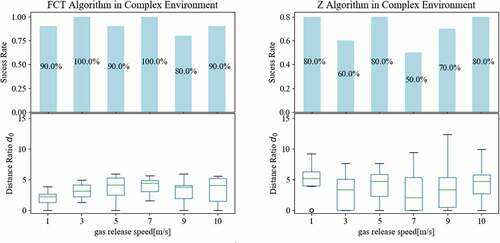
Figure 14. Schematic diagram of UAV population.
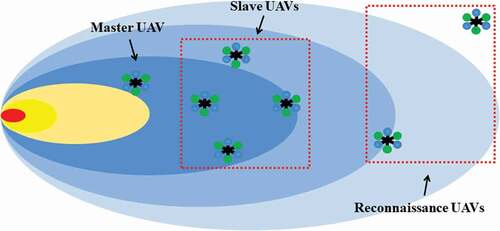
Figure 15. Schematic diagram of a slave location update strategy.
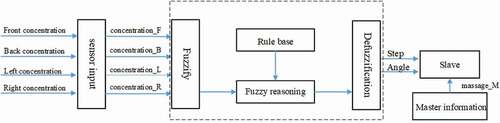
Figure 16. Analysis of simulation results under steady-state conditions. (a) Wind speed, (b) Source intensity, (c) Total population.
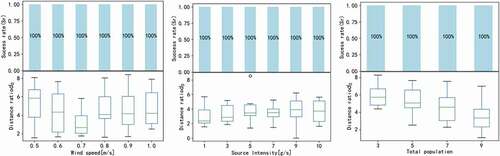
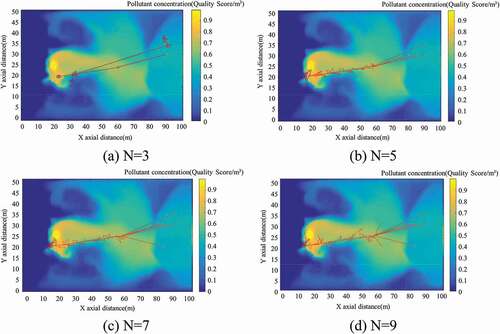
Figure 17. Schematic diagram of traceability algorithm simulation.
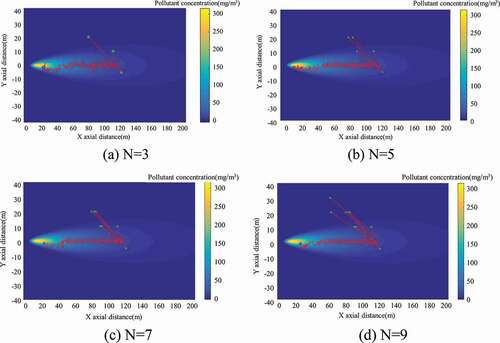
Figure 18. Analysis of simulation results under complex turbulent flow conditions. (a)Wind speed, (b) Source intensity, (c) Total population.
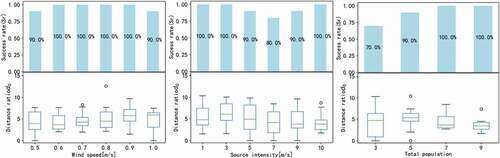
Figure 19. Schematic diagram of traceability algorithm simulation where N = 3 (a), 5 (b),7 (c), and 9 (d).
Data availability statement
The data that support the findings of this study are available from the corresponding author, Tao Ding, upon reasonable request.