
Figures & data
Table 1. Abbreviations used in this study
Figure 1. Schematic representation of search spaces. Node
is at the border of a search space. The time expense of pattern H0 –
– H1 is equal to
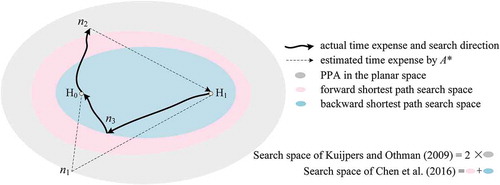
Figure 2. Four-state supernetwork representation of conducting two activities (Liao Citation2019)
Figure 3. Schematic representation at the search frontier using the method of Liao (Citation2019). The partial ATP from
to
has activity sequence red→blue→green
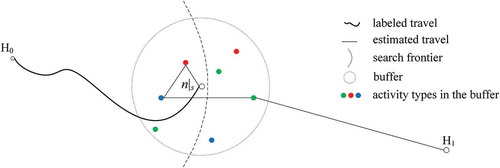
Table 2. Notation list
Figure 4. Schematic representation of the search space of the naïve SBS method (it is comparable with only when the blue ellipses are drawn on the same scale)
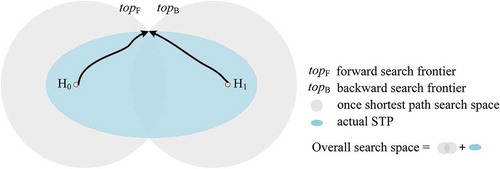
Figure 5. Schematic representation of goal-directed SBS method
Figure 6. Schematic representation of the search space of the goal-directed SBS method (it is comparable with only when the blue ellipses are drawn on the same scale)
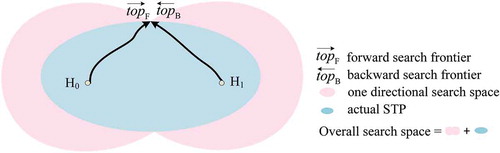
Figure 7. Flowchart of the TBS and SBS methods
Figure 8. Eindhoven-Helmond corridor (scale: 1:150,000)
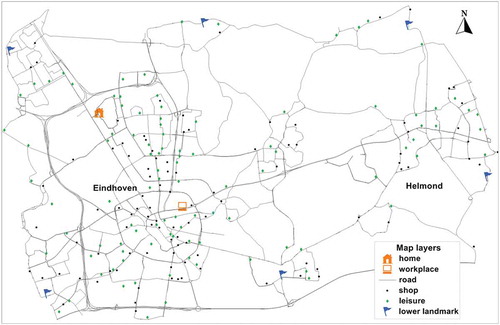
Figure 9. Exact activity state-dependent PPAs (in blue) by car
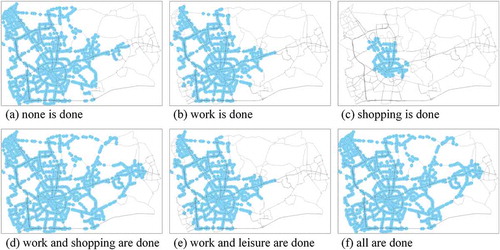
Figure 10. Exact activity state-dependent PPAs (in blue) by bike
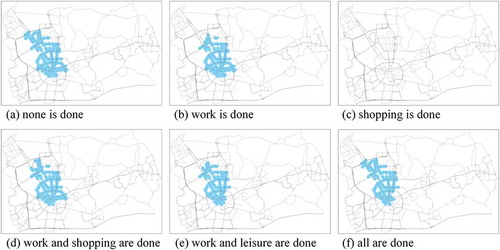
Table 3. Numbers of accessible locations (lower – upper bound in Liao (Citation2019)/exact)
Figure 11. Grid network for one flexible activity
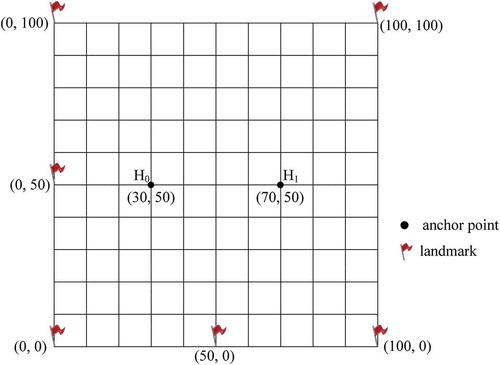
Figure 12. Search spaces of different methods
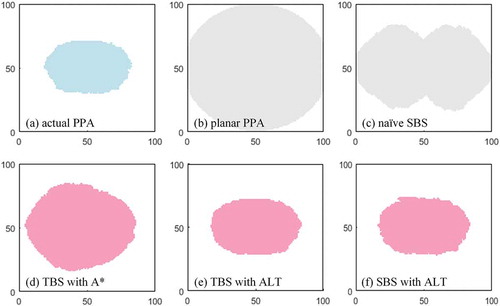
Figure 13. Extra nodes explored beyond the actual PPA of different methods
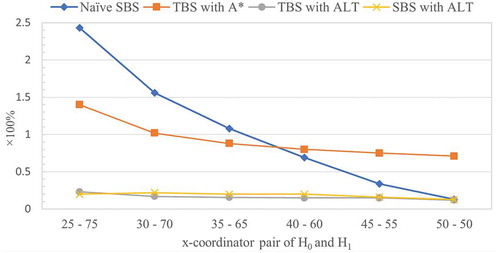
Figure 14. Grid network for one AP of three activities with flexible activity sequences
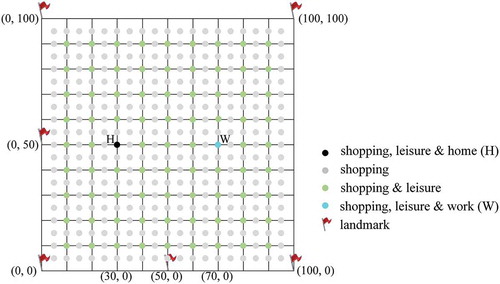
Figure 15. State-dependent PPAs and search spaces of different methods
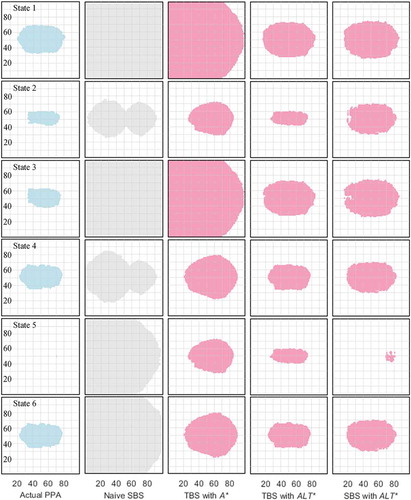
Figure 16. Extra nodes explored beyond the actual PPA of different methods
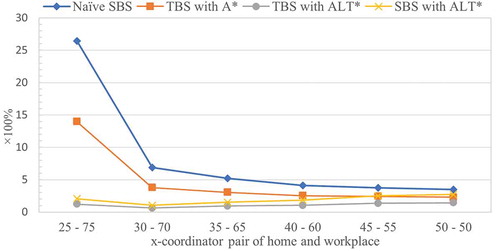
Table 4. Numbers of nodes explored and computation times
Table 5. Computation time in second for 1000 random pairs (the least times are in bold)
Data and codes availability statement
The data and codes that support the findings of this study are available in figshare.com with the identifier(s) at the link https://doi.org/10.6084/m9.figshare.13108094.v2.