Figures & data
Figure 1. Capability of the presented single model of reproducing classical scheduling policies such as RR, FCFS, SJF and SRTF.
Figure 2. An example of model-based memory management.
Figure 3. Collected data from the specified software application (black solid line) and simulation with the grey box identified model (blue dashed line).
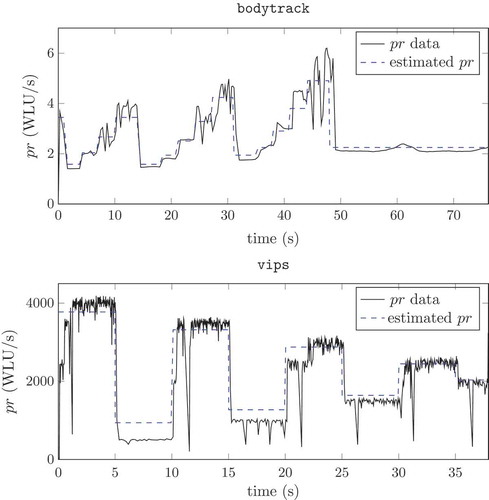
Figure 4. Identification results for the vips software application with different model structures. The data used for the identification are denoted with a solid line, the simulation results of the ARMAX (10, 10, 10) with a dashed-dotted line, the ARX (30, 30) with a densely dotted line, the ARX (20, 20) with a densely dashed line, the ARX (10, 10) with a densely dotted line, and the ARX (1, 1) with a dashed line.
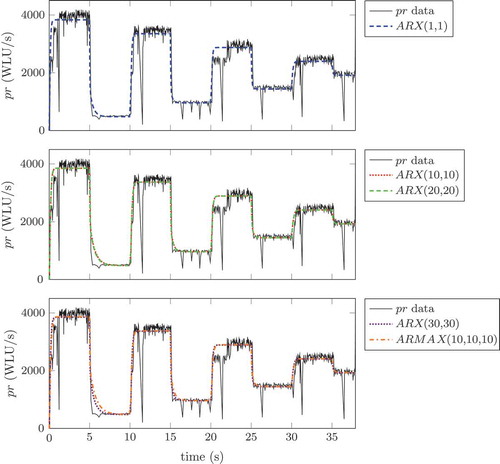
Table 1. Results obtained with the Matlab identification Toolbox for the vips application with various model structures.
Figure 5. Experimental control results with bodytrack and vips: the application progress rate is required to attain a specified set point value.
Figure 6. Experimental results with different model-based/non-model-based techniques. Note: SARSA, State-Action-Reward-State-Action; MPC, Model Predictive Control.