Figures & data
Figure 1. Solutions u(x; μ) and the corresponding obstacles h(x; μ) of the first numerical example in Section 4.
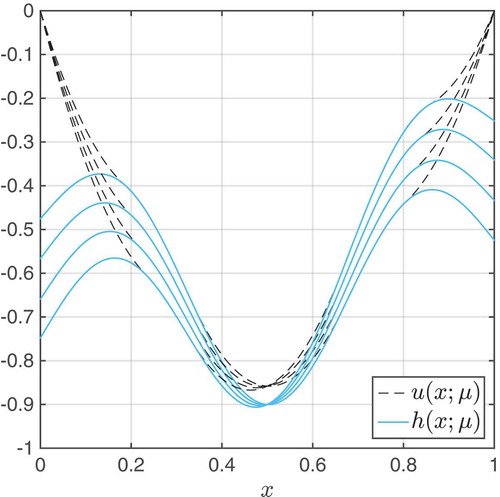
Figure 2. The first five basis vectors forming gM’s space WM in the numerical example for the barrier method in Section 4. The basis is constructed by EIM.
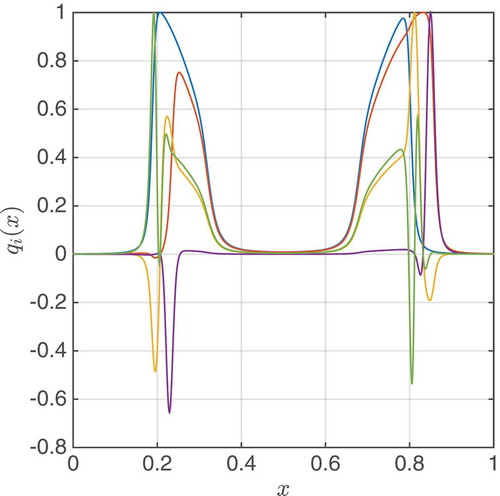
Figure 3. First five basis vectors forming the reduced basis space in the numerical example for the barrier method in Section 4. The basis
is constructed by greedy procedure based on the a posteriori error estimator (only the residual part
NM).
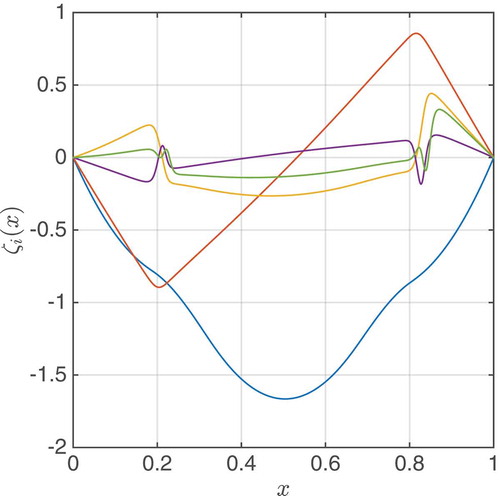
Figure 4. Relative convergence of barrier/exp-penalty solutions to the reference solution, depending on the homotopy parameter , measured in V-norm.
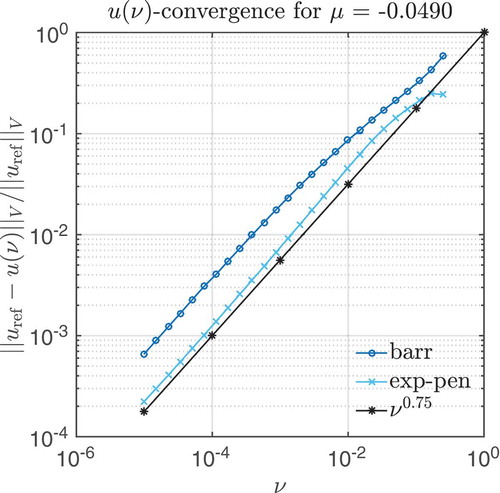
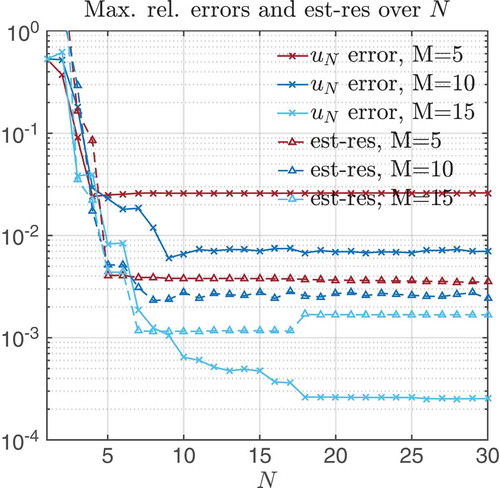
Figure 5. Barrier method: maximal relative error and estimator decay (only residual part) for different N, M values.
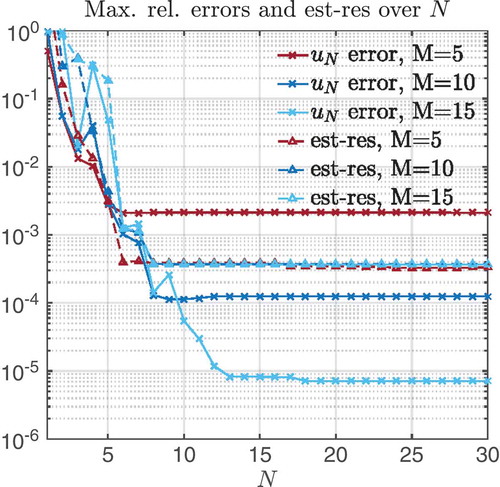
Figure 6. Exp-penalty method: maximal relative error and estimator decay (only residual part) for different N, M values.
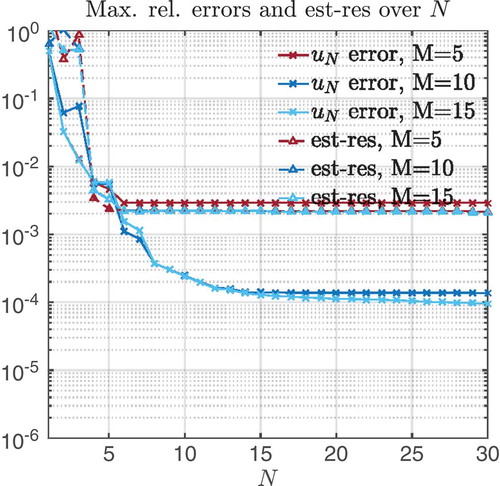
Figure 7. Barrier method: Numerical instabilities for the case when the homotopy parameter is very small (final = 1E – 4). Maximal relative error and estimator decay (only residual part) for different M, N values.
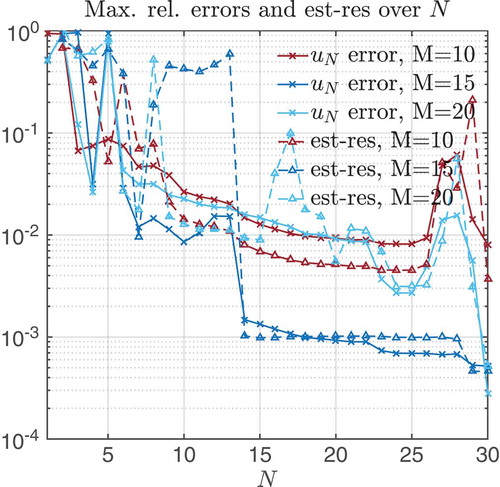
Figure 8. Exp-penalty method: Numerical instabilities the case when the homotopy parameter is very small (final = 1E – 4). Maximal relative error and estimator decay (only residual part) for different M, N values.
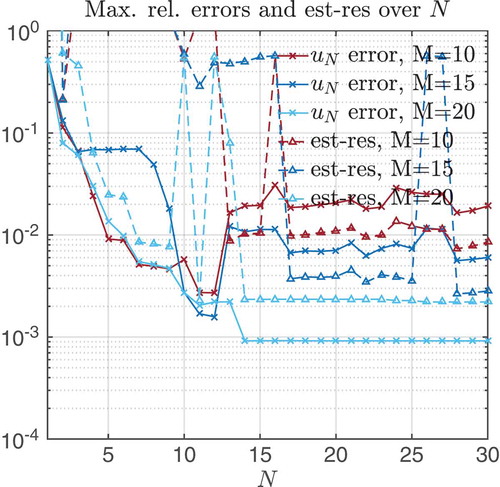
Table 1. Barrier method.
Table 2. Exp-penalty method.
Table 3. Barrier method.
Figure 9. Solutions u(x; μ) and the corresponding obstacles h(x; μ) of the second numerical example; using the exp-penalty method (final = 1E – 3).
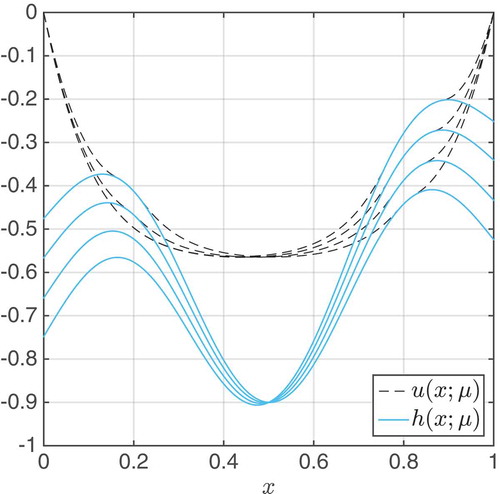
Figure 10. The exp-penalty method applied to a VI with non-linear f(∙): Maximal relative error and estimator decay (only residual part) for different N, M values.