
Figures & data
Figure 1. The architecture of indirect neural control.
Figure 2. The principle of neural network model.
Figure 3. The new architecture of indirect neural control.
Table 1. The usual kernel functions.
Figure 4. and
trajectories.
Table 2. The comparison results of the used kernel function in the identification error.
Table 3. The influence of the dimensionality reduction in the identification error.
Table 4. The influence of the dimensionality reduction in the control error.
Figure 5. The pre-processing control system output and the desired values.
Figure 6. The control law.
Figure 7. The control error.
Figure 8. The pre-processing control system output and the desired values.
Figure 9. The control law.
Figure 10. The control error.
Table 5. The influence of the dimensionality reduction in the identification error.
Table 6. The influence of the dimensionality reduction in the control error.
Table 7. The influence of the dimensionality reduction in the identification error.
Table 8. The influence of the dimensionality reduction in the control error.
Table 9. The influence of the dimensionality reduction in the identification error.
Table 10. The influence of the dimensionality reduction in the control error.
Figure 11. The control system output, the desired values and the control error.
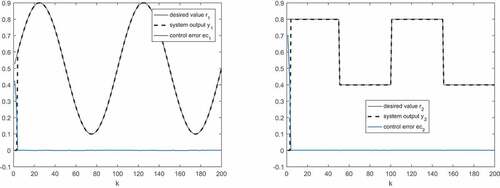
Figure 12. The control law and
trajectories.
Table 11. The influence of the dimensionality reduction in the model error.
Table 12. The influence of the dimensionality reduction in the control error.