Figures & data
Table 1. List of symbols with their biological meaning.
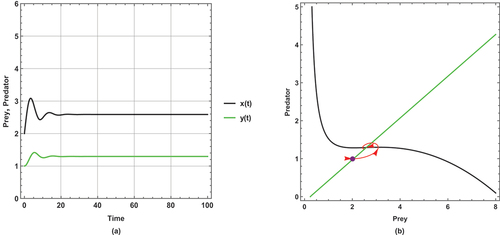
Figure 1. Prey predator dynamics of the system (1) when : (a) time series (b) nullclines and phase portrait trajectories. Other parametric and initial values are:
,
,
,
,
,
,
.
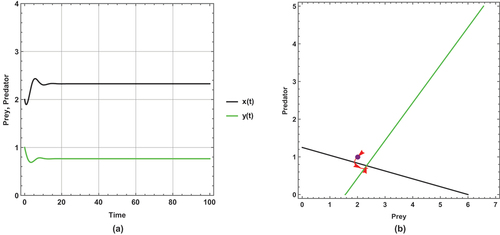
Figure 2. Prey predator dynamics of the system (1) when : (a) time series (b) nullclines and phase portrait trajectories. Other parametric and initial values are:
,
,
,
,
,
,
.
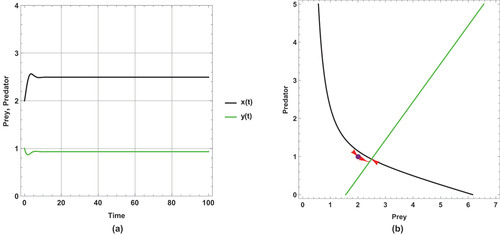
Figure 3. Prey predator dynamics of the system (1) when : (a) time series (b) nullclines and phase portrait trajectories. Other parametric and initial values are:
,
,
,
,
,
,
.

Figure 4. (a) Time series (b) nullclines and phase portrait trajectories of the first set of system (2) when . Other parametric and initial values are:
,
,
,
,
,
,
,
.
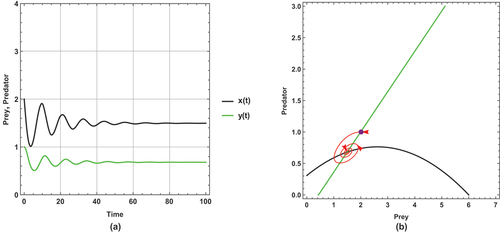
Figure 5. (a) Time series (b) nullclines and phase portrait trajectories of the first set of system (2) when . Other parametric and initial values are:
,
,
,
,
,
,
,
.
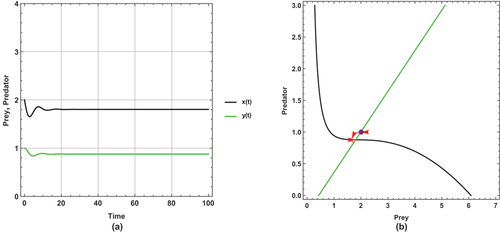
Figure 6. (a) Time series (b) nullclines and phase portrait trajectories of the first set of system (2) when . Other parametric and initial values are:
,
,
,
,
,
,
,
.
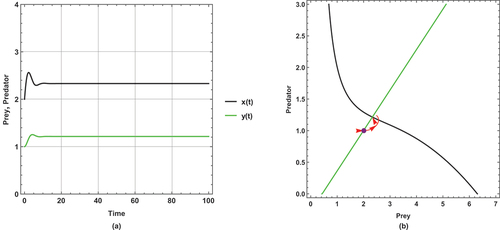
Figure 7. (a) Time series (b) nullclines and phase portrait trajectories of the second set of system (2) when . Other parametric and initial values are:
,
,
,
,
,
,
,
.
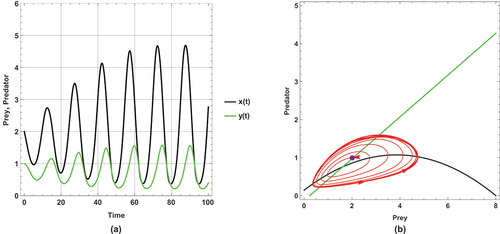
Figure 8. (a) Time series (b) nullclines and phase portrait trajectories of the second set of system (2) when . Other parametric and initial values are:
,
,
,
,
,
,
,
.
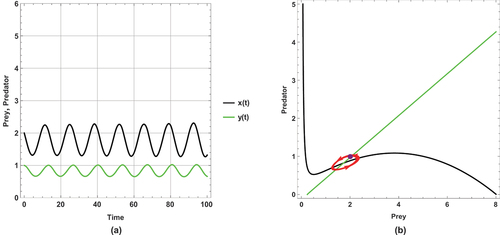
Figure 9. (a) Time series (b) nullclines and phase portrait trajectories of the second set of system (2) when . Other parametric and initial values are:
,
,
,
,
,
,
,
.