Figures & data
Figure 1. The dancer watches and reacts to the movement sequences generated by the model. Some sequences show a clear humanoid shape while others are more abstract.
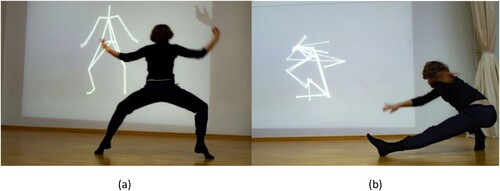
Table 1. This work was performed across five sessions and documented through discussion transcripts, diary entries and video-cued recall. Our initial exploration of glitch as a creative catalyst prompted the implementation of our browsing interface and the following sessions using the interface in choreographic development and teaching.
Figure 2. Poses from three AI-generated dance clips shown to the dancer in our study. The clips range from stable, human-like movements (a) to semi-glitched, where the sequence contains moments where the body distorts (b) to fully glitched (c) where it is no longer possible to differentiate between limbs.
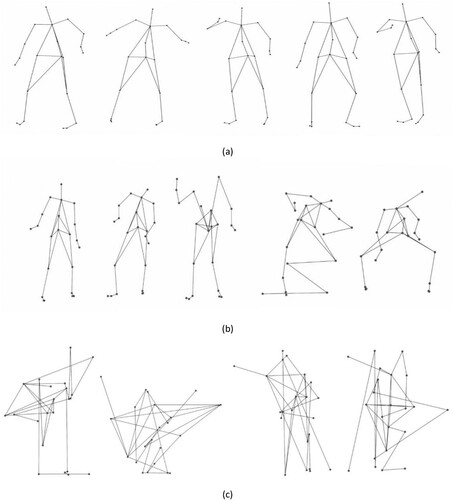
Figure 4. (a) The dancer explores the AI-generated clips. (b) A screen shot of the interface deployed to the web.
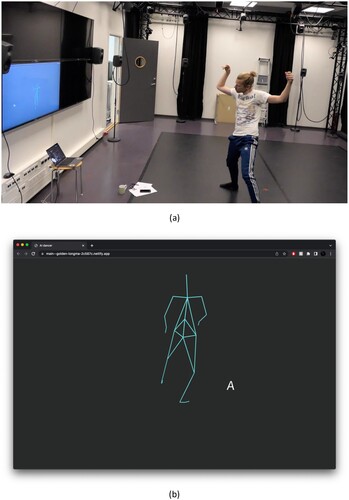
Figure 3. Line graph presenting the ratings from 1 (least) to 5 (most) across four features chosen by the dancer: quantity of movement (QoM), preference, glitch, and flow. The dancer’s preference for each clip is most closely correlated (RMSE = 0.70) to the QoM.
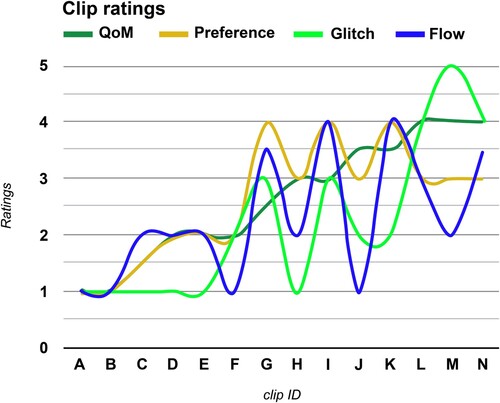
Figure 5. The dancer provided three different prompts in the improvization class. During prompt 1 the students face the screen, during the second prompt students face each other so only one in each pair can see the screen. In the final prompt the students can move freely. This figure shows the field of view of the dancers for each prompt. During prompt 1 and 3 the students all see the AI, while during prompt 2 only one student in each pair can see the AI.
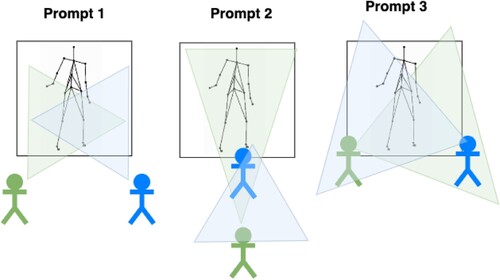
Figure 6. Six dance students use the interface as a visual inspiration source during the improvization class.
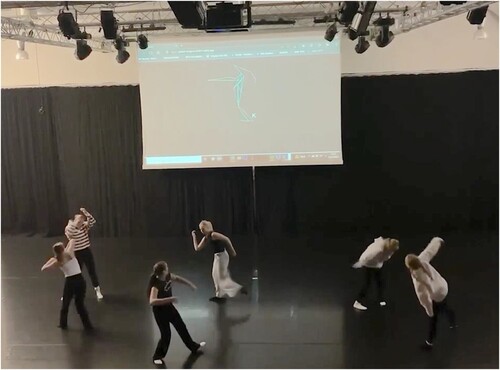
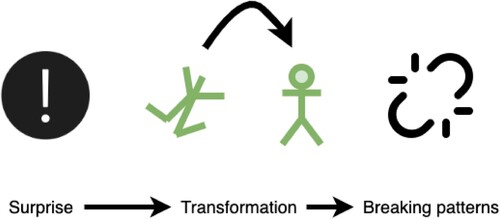
Figure 7. We find a natural ordering of our conceptual themes, where surprise encourages transformation which allows for the breaking of movement patterns. This process is initiated when improvizing using the AI-glitches as a creative catalyst, allowing the dancer to challenge himself, through translation from impossible to possible, to break ingrained movement patterns.