
Figures & data
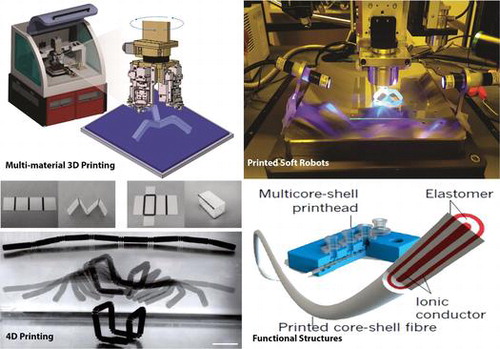
Figure 1. Examples of printed soft robots and soft devices. (a) Pre-strained polystyrene substrate with inkjet-printed hinges made of carbon black ink. (b) 3D-printed jumping soft robot. (c) 3D stereolithography-printed bat with curvature time lapse. (d) 4D-printed composite with swellableable hinges. (e) 4D-printed unfolded box composed of shape memory polymers. (f) A jumping soft robot with 3D-printed mould. (g) 4D printing of hydrogel composites for soft robotic applications. (h) A snake inspired soft robot with 3D-printed mould. (i) Multi-step 3D-printed octobot. (j) Pneumatic actuator for spinal compression and flextion with 3D-printed mould. (k) Embedded 3D printing of soft strain sensor for soft robots. (l) Multicore print head shell capacitive sensor.
Figure 2. (a) Multi-material 3D printing system by Advanced Micro Mechatronics (AMM) Research Lab, Jeju National University, South Korea. (b) Photograph of the AMM’s multi-material 3D printing system. (c) Soft omnidirectional actuator by AMM Lab. (d) (i) Fabricated soft-bot actuation of each leg at different time intervals. (ii) Model of actuation to generate movement at different time intervals. (iii) Finite-element displacement simulation results of one complete actuation cycle. (iv) Finite element strain simulation of one complete actuation cycle.
Table 1. Summary of 3D printing technology with respect to soft robots.
Figure 3. 3D Printing techniques used to fabricate soft robots. (i) A liquid resin is selectively photo-polymerized in the process of SLA by a laser. (ii) Inkjet printing is similar to SLA in many ways with a difference that a movable inkjet head is used in this technique to apply a photopolymer being activated by a UV lamp. (iii) The powder of metal material is rolled across a build platform and a laser is directed into the powder followed by rolling the powder over the top of as-deposited layer and this process keeps on repeating till the desired 3D object is completely fabricated. (iv) DIW is an alternative printing technique to FDM for additive manufacturing of desired objects under ambient conditions in which ink passes through a nozzle in a controlled manner. (v) Shape deposition modelling technology consists of several steps including deposition. The material in heterogeneous deposition is changed between each deposition process. (vi) Soft materials are printed in the form of a continuous filament in FDM method with a single layer being deposited at a time.
Figure 4. 3D-printed bio-medical soft robot. (a) 3D CAD model of the carotid artery. (b) 3D-printed scaled version of the carotid artery. (c) Traveling of omnidirectional robot inside carotid artery without controlled steering. (d) Demonstration of static steering of omnidirectional robot inside carotid artery. (e) Traveling of omnidirectional robot inside carotid artery [Citation4].
![Figure 4. 3D-printed bio-medical soft robot. (a) 3D CAD model of the carotid artery. (b) 3D-printed scaled version of the carotid artery. (c) Traveling of omnidirectional robot inside carotid artery without controlled steering. (d) Demonstration of static steering of omnidirectional robot inside carotid artery. (e) Traveling of omnidirectional robot inside carotid artery [Citation4].](/cms/asset/5723592c-e0bf-4cef-8b96-5b484c39daf3/tsta_a_1431862_f0004_oc.gif)