Figures & data
Figure 1. Geometry of the thin-layer model (not to scale). is the radius of the Earth, and
corresponds to the height of the thin layer. Compared with
and
, the height of Earth’s surface and antenna height are so small that they can be ignored.
denotes the zenith angle at the IPP
Figure 2. distribution 450 km above Antarctica at 0:00 UTC, 1 January 2012. One TEC unit (TECU) = 1016 electrons/m2
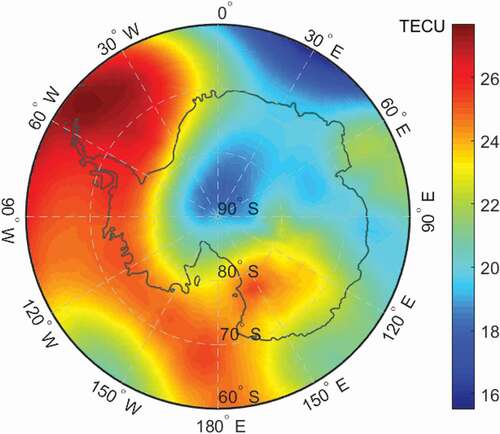
Figure 3. Geomagnetic field intensity distribution in Antarctica on 1 January 2012 450 km above the surface of the Earth, calculated based on IGRF-12. (a) Total intensity and (b)–(d) the field intensity in the x, y, and z, directions, respectively. The unit of geomagnetic field intensity is nano Tesla
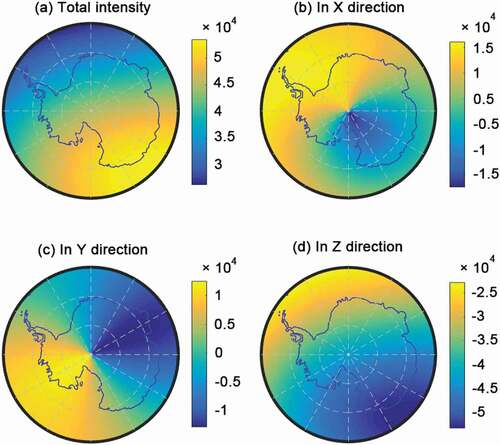
Figure 4. Antenna of continuously operating GPS system in Zhongshan Base, Larsemann Hills, East Antarctica. The GPS receiver type is LEICA GRX1200PRO, and the antenna type is LEIAT504

Figure 5. (a). Geographic distribution of the continuously operating GPS stations adopted in this study. Note that KUNL (Kunlun Base, China) is a summer station, only providing the data during January. (b). IPP distribution from 00:00 to 12:00 UTC on day 20120101
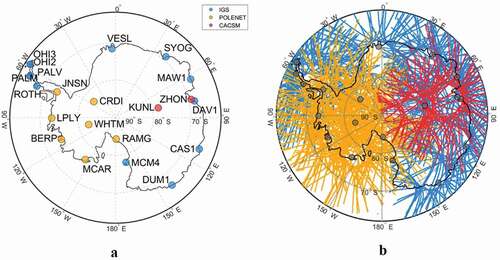
Figure 6. Flowchart of the data processing. TEQC (Translation, Editing, and Quality Check; Estey and Meertens Citation1999) and GPSTk (GPS Toolkit; Harris and Mach Citation2007) were used in the GPS preprocessing, and least squares estimation was undertaken in MATLAB software
Table 1. Mean values of GPS positioning errors in x, y, and z directions for each station derived by the second-order ionospheric term during the whole year for 2012 (mm)
Figure 7. Time series of positioning errors derived by the second-order ionospheric term for twenty-one Antarctic GPS stations in 2012. Components x, y, and z represent the positioning errors in the east, north, and vertical directions, respectively
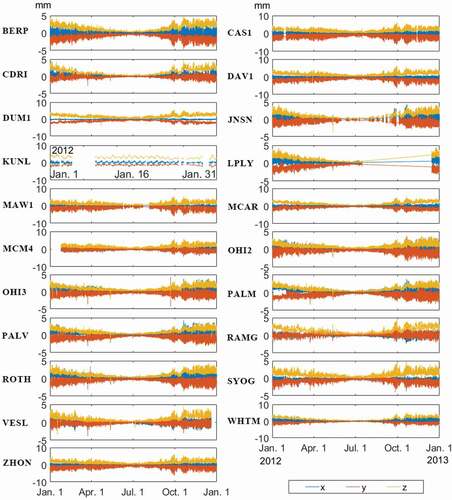
Figure 8. Yearly motion for each GPS station derived by the second-order ionospheric term. The arrows represent the size and direction of horizontal movement, and the depth of the color represents the size of the upward movement
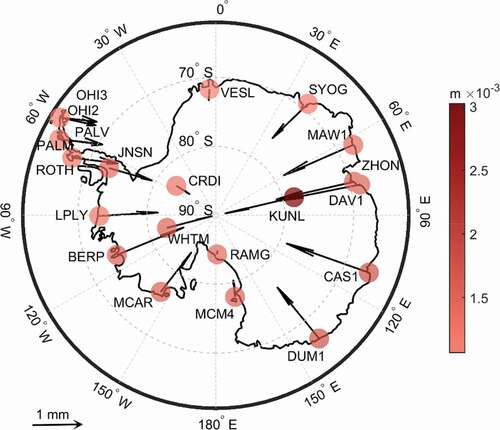
Figure 9. Average values over all twenty-one stations for the year 2012. The time interval was set to every 2 hours
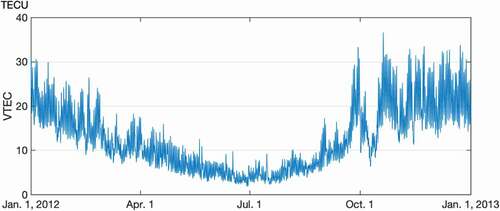
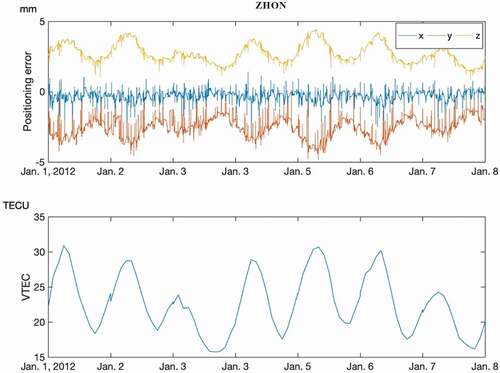
Figure 10. Relation of and the positioning error for the first week of 2012. The top panel shows the effect of the second-order ionospheric term on GPS positioning in the x, y, and z directions at ZHON station. The bottom panel shows the average
values over the twenty-one stations