
Figures & data
Figure 1. Deployment phase of a TRAC.
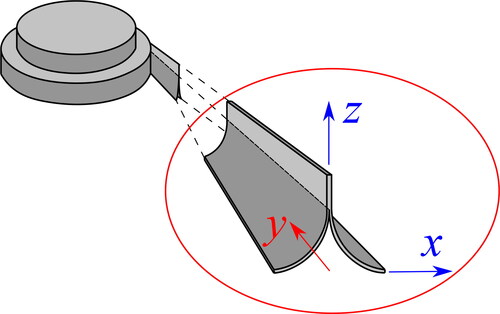
Figure 2. Deployment phase of a tape-spring.
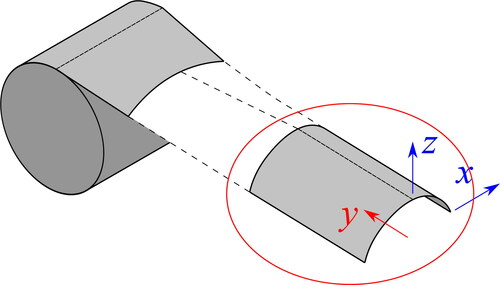
Figure 3. One-dimensional model of the TRAC.
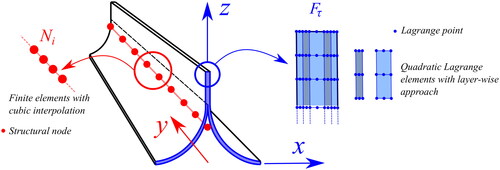
Figure 4. One-dimensional model of the tape-spring.
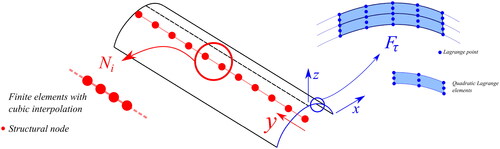
Figure 5. Geometry and stacking sequence of the composite TRAC subjected to positive and negative moments Mx. The blue color indicates the CF layers, the red color indicates the CFPW material.
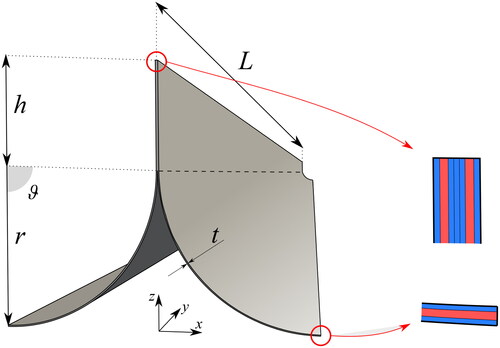
Table 1. Material properties of the composite TRAC.
Figure 6. Nonlinear static solution for the composite TRAC subjected to positive and negative moments Mx.
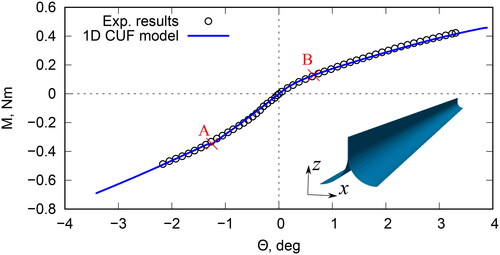
Figure 7. Nonlinear equilibrium states correspondent to the point “A” of for the composite TRAC subjected to a negative moment Mx. Numerical (a) vs. experimental (b) solutions (elaborated from Ref. [Citation49]).
![Figure 7. Nonlinear equilibrium states correspondent to the point “A” of Figure 6 for the composite TRAC subjected to a negative moment Mx. Numerical (a) vs. experimental (b) solutions (elaborated from Ref. [Citation49]).](/cms/asset/1265c090-03ad-4cca-bfcd-0f2f00a60543/umcm_a_2037173_f0007_c.jpg)
Figure 8. Nonlinear equilibrium states correspondent to the point “B” of for the composite TRAC subjected to a positive moment Mx. Numerical (a) vs. experimental (b) solutions (elaborated from Ref. [Citation49]).
![Figure 8. Nonlinear equilibrium states correspondent to the point “B” of Figure 6 for the composite TRAC subjected to a positive moment Mx. Numerical (a) vs. experimental (b) solutions (elaborated from Ref. [Citation49]).](/cms/asset/a4d2dc0e-8a5a-46fb-8add-ae472369ba37/umcm_a_2037173_f0008_c.jpg)
Figure 9. Nonlinear static solution for the composite TRAC subjected to positive and negative moments Mx considering the and
stacking sequences.
![Figure 9. Nonlinear static solution for the composite TRAC subjected to positive and negative moments Mx considering the [±45GFWP/45CF/±45GFWP] and [±45GFWP/90CF/±45GFWP] stacking sequences.](/cms/asset/e7cacc30-af04-43a8-9808-d2af99eeb476/umcm_a_2037173_f0009_c.jpg)
Figure 10. Nonlinear equilibrium states correspondent to the buckling of the TRAC subjected to negative (a) and positive (b) moments Mx. The equilibrium states correspond to the red circled of the .
![Figure 10. Nonlinear equilibrium states correspondent to the buckling of the [±45GFWP/45CF/±45GFWP] TRAC subjected to negative (a) and positive (b) moments Mx. The equilibrium states correspond to the red circled of the Figure 9.](/cms/asset/17bf41c8-4eb6-431a-86b5-1f9e0b26900f/umcm_a_2037173_f0010_c.jpg)
Figure 11. Nonlinear equilibrium states correspondent to the buckling of the TRAC subjected to negative (a) and positive (b) moments Mx. The equilibrium states correspond to the gray circled of the .
![Figure 11. Nonlinear equilibrium states correspondent to the buckling of the [±45GFWP/90CF/±45GFWP] TRAC subjected to negative (a) and positive (b) moments Mx. The equilibrium states correspond to the gray circled of the Figure 9.](/cms/asset/be3313d0-8f20-4f3d-94f3-c42487f0ee52/umcm_a_2037173_f0011_c.jpg)
Figure 12. Geometry of the isotropic tape.
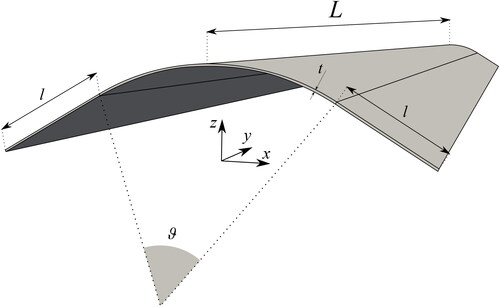
Figure 13. A 170 mm sample of commercial tape-spring. Figure elaborated from Ref. [Citation39].
![Figure 13. A 170 mm sample of commercial tape-spring. Figure elaborated from Ref. [Citation39].](/cms/asset/ffca6e68-ed34-4091-852b-1890448fa75e/umcm_a_2037173_f0013_c.jpg)
Figure 14. Nonlinear static solution for the isotropic tape subjected to positive and negative moments Mx.
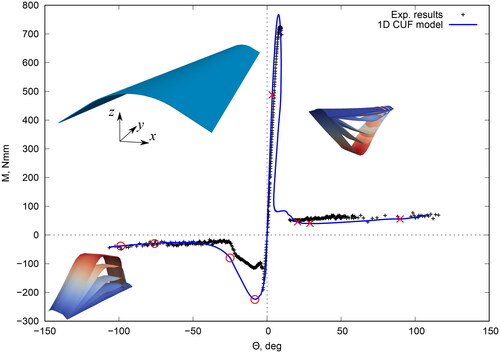
Figure 15. Nonlinear equilibrium states correspondent to crosses of for the isotropic tape subjected to a positive moment Mx. Numerical (a) vs. experimental (b) solutions, elaborated from Ref. [Citation39].
![Figure 15. Nonlinear equilibrium states correspondent to crosses of Figure 14 for the isotropic tape subjected to a positive moment Mx. Numerical (a) vs. experimental (b) solutions, elaborated from Ref. [Citation39].](/cms/asset/9eec3174-203f-44a0-96eb-a38e6acf2d9e/umcm_a_2037173_f0015_c.jpg)
Figure 16. Nonlinear equilibrium states correspondent to circles of for the isotropic tape subjected to a positive moment Mx. Numerical (a) vs. experimental (b) solutions, elaborated from Ref. [Citation39].
![Figure 16. Nonlinear equilibrium states correspondent to circles of Figure 14 for the isotropic tape subjected to a positive moment Mx. Numerical (a) vs. experimental (b) solutions, elaborated from Ref. [Citation39].](/cms/asset/782292a4-eff2-4330-a9ef-380e503629aa/umcm_a_2037173_f0016_c.jpg)
Figure 17. Nonlinear static solution for the isotropic tape using a defect load.
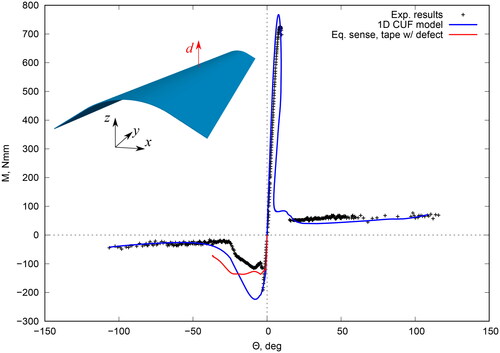
Figure 18. Nonlinear equilibrium states correspondent to crosses of for the isotropic tape subjected to a positive moment Mx, using a defect load for the numerical simulations. Experimental figures elaborated from Ref. [Citation39].
![Figure 18. Nonlinear equilibrium states correspondent to crosses of Figure 14 for the isotropic tape subjected to a positive moment Mx, using a defect load for the numerical simulations. Experimental figures elaborated from Ref. [Citation39].](/cms/asset/afd47425-4046-4ac2-a121-6de5fc7c33b6/umcm_a_2037173_f0018_c.jpg)