
Figures & data
Figure 1. General framework of the procedure, with crowd densities ρ ranging from 0.2 to 1.5 ped/m2, natural frequencies f from 0.5 to 5.5 Hz, and damping ratios ξ from 0.1 to 10%, which correspond to extra dampings in line with Section 6.1.
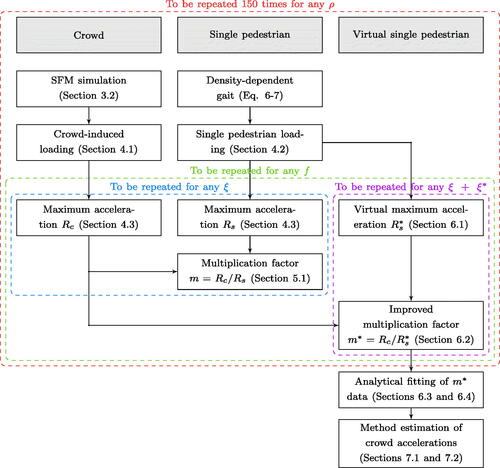
Figure 2. Example pedestrian crossing the footbridge: trajectory (black line), foot standing points on the trajectory (black markers), and projection of the foot positions on the bridge centreline (grey markers).
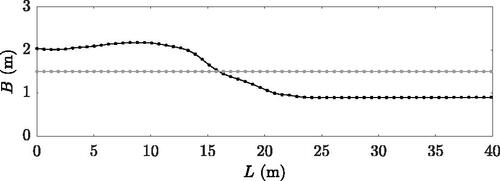
Table 1. Meta-parameters implemented in the SFM after Bassoli and Vincenzi (Citation2021).
Figure 3. SFM simulated crowd made of 108 pedestrians: instantaneous (a) number of occupants and (b) mean crowd velocity in thick black, respective theoretical values in thin grey.
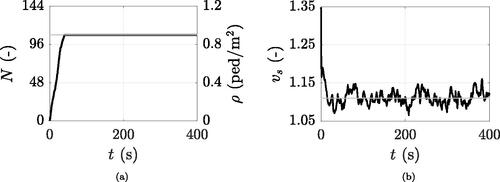
Figure 4. Standard deviation of personal simulated speeds (a) and step frequencies (b) versus crowd density.
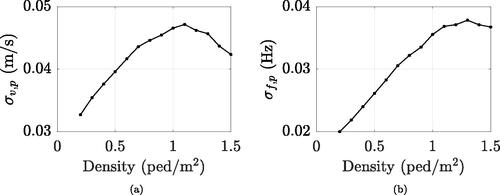
Figure 5. Standard deviation of collective speeds (a) and step frequencies (b) versus crowd density: simulations (dot markers) and analytical proposal (grey line).
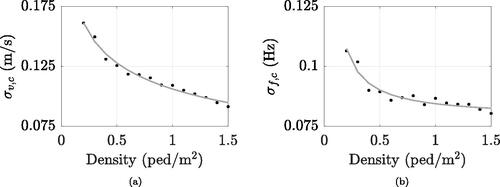
Figure 6. Implemented loadings: (a) force induced by a pedestrian who is part of a crowd (thick line), obtained by the superimposition of left (thin black lines) and right (thin grey lines) step forces; (b) force due to the crowd-coupled undisturbed representative single pedestrian; (c) modal force corresponding to (a); (d) modal force induced by the overall crowd.
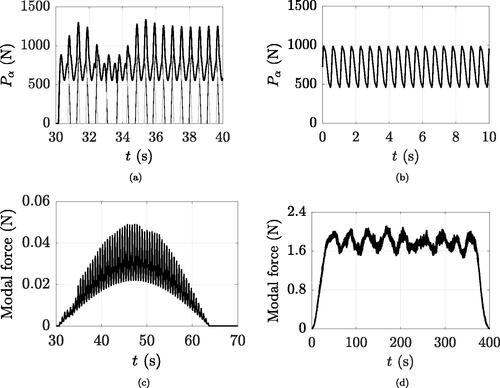
Figure 7. Example case of ped/m2 and
%: (a) crowd-induced maximum accelerations (150 simulated runs) in black and mean trend in dashed white, (b) maximum acceleration due to the crowd-coupled single pedestrian, (c) multiplication factors in black and mean trend in dashed white.
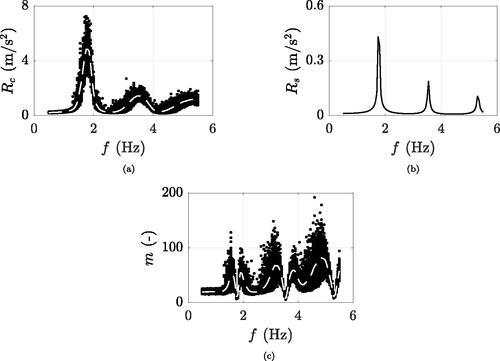
Figure 8. Simulated mean crowd-induced maximum acceleration (black) and 95% confidence intervals (grey) to increasing number of runs: ped/m2,
% and (a) f = 1.77 Hz or (b) f = 3.54 Hz.
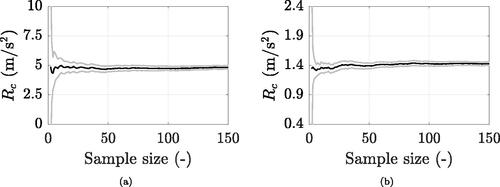
Figure 9. Standard deviation of numerically simulated crowd-induced accelerations, varying one parameter individually while keeping all others constant at their example values:
ped/m2,
(-), f = 1.77 (black lines) or 2.65 Hz (grey lines).
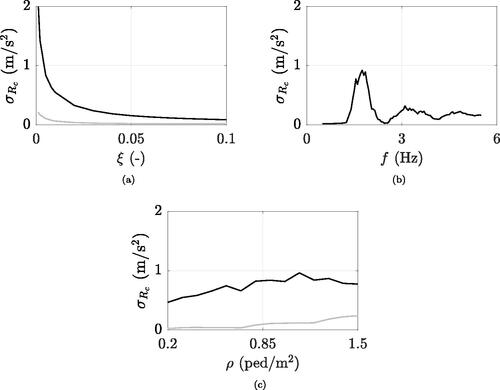
Figure 10. Simulated multiplication factor (in black) compared to the literature (Bachmann and Ammann (Citation1987) in dashed red, Grundmann et al. (Citation1993) in dash-dotted green, and Fujino et al. (Citation1993) in dotted blue): (a) specific crowd density and structural damping ( ped/m2,
%), (b) fixed natural frequency depending on the crowd density.
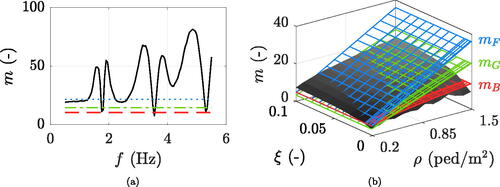
Figure 11. Example case of ped/m2 and
%: (a) maximum acceleration due to the crowd-coupled virtual single pedestrian; (b-c) simulated improved multiplication factors in black, mean trend in dashed white, (b) fitted function in solid green, and (c) analytical function in solid blue; (d) simulated crowd induced maximum accelerations in black, mean trend in dashed white, and analytical prediction in solid blue.
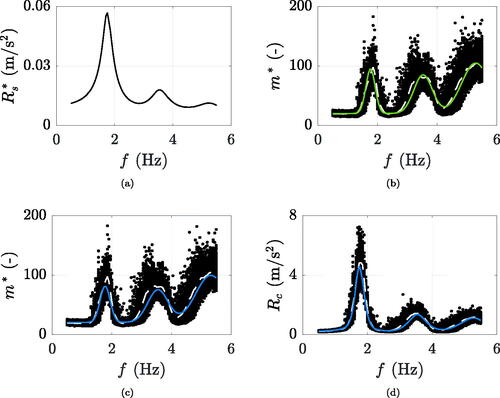
Figure 12. Analytical definition (blue surfaces) of two out of eight parameters, based on the discrete values resulting from the simulated improved multiplication factor mean trend fitting (green dots).
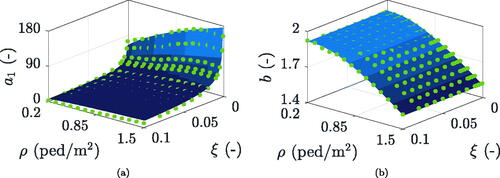
Table 2. Analytical definitions of coefficients a1, a2, a3, b, c1, c2, c3, and d. In this, fs follows EquationEquation (6)(6)
(6) and EquationEquation (7)
(7)
(7) adopted in sequence, ρ is expressed in ped/m2, A in m2, and ξ is unitless (-).
Figure 13. Example case of ped/m2 and
%: (a) simulated crowd induced maximum accelerations in black, 95th percentile in dash-dotted white, and analytical prediction in solid red; (b) analytical definition (red surface) of the Δ factor, based on the discrete values resulting from the ratio of 95th to 50th percentiles of simulated maximum crowd-induced accelerations (orange dots).
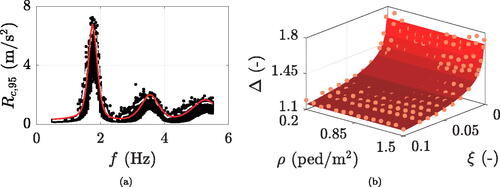
Figure 14. Method prediction of the accelerations Rc (average maximum) and (95th percentile maximum) induced by a crowd density
within
ped/m2 on a footbridge whose natural frequency
and damping ratio
are between
Hz and
(-), respectively. In case of considering HSI, replace
and
with the dynamic properties of the crowd-structure coupled system.
![Figure 14. Method prediction of the accelerations Rc (average maximum) and Rc,95 (95th percentile maximum) induced by a crowd density ρ¯ within [0.2,1.5] ped/m2 on a footbridge whose natural frequency f¯ and damping ratio ξ¯ are between [0.5,5.5] Hz and [0.001,0.1] (-), respectively. In case of considering HSI, replace f¯ and ξ¯ with the dynamic properties of the crowd-structure coupled system.](/cms/asset/891643f5-9f41-4da0-85b4-6c9008ae72fa/nsie_a_2386456_f0014_b.jpg)
Figure 15. Overlay of crowd-induced maximum accelerations predicted by the method referring to (a) fixed damping ratio (%) and varying crowd density, and (b) fixed crowd density (
ped/m2) and varying damping ratio.
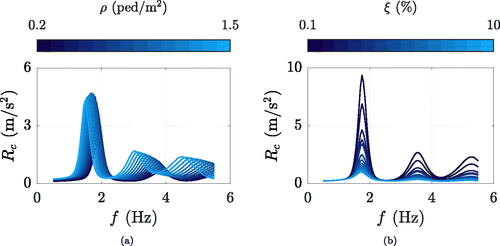
Figure 16. Crowd accelerations (maximum values) resulting from the post-processed SFM (black dots) and relevant mean trend (red line) for % and f equal to (a) 1.5 and (b) 2.0 Hz.
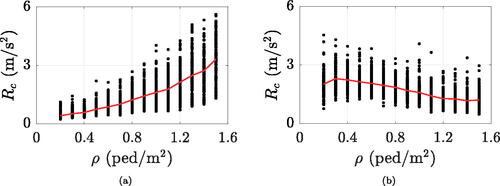
Figure 17. Example case of ped/m2 and
%: overlay of crowd-induced maximum accelerations predicted by the method at varying (a) footbridge length L (m) and (b) footbridge width B (m).
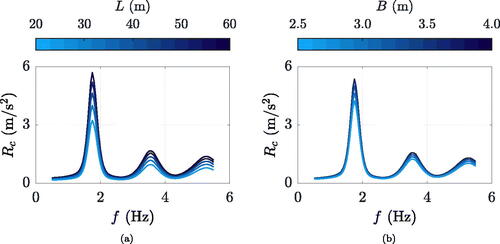
Figure 18. Maximum crowd accelerations: (i) simulated through the post-processed SFM (black dots) with corresponding 95th percentile (white dash-dot line), (ii) estimated by the method (red line), and (iii) induced by the guideline forcings (violet point markers, blue dashed, green dash-dot and grey dotted lines respectively correspond to BSI (Citation2008), HIVOSS (Citation2008), ISO 10137 (Citation2007), and SETRA (Citation2006)) for six representative density-damping clusters, combining crowd densities of 0.5, 0.8 and 1.0 ped/m2 (in rows) to structural damping ratios of 0.5 and 1.0% (in columns).
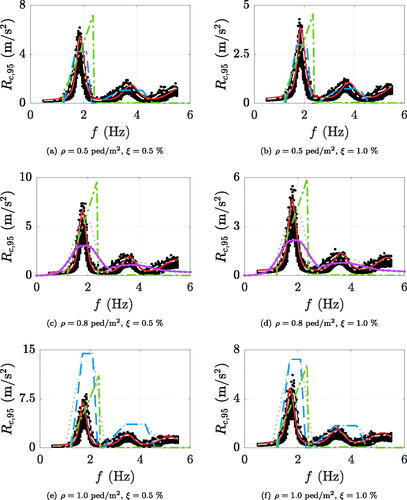
Table 3. Free walking events performed on the eeklo footbridge by Van Nimmen et al. (Citation2021): identification names, crowd densities, experimental maximum accelerations at the mid-central-span, average maximum values per density group and corresponding standard deviations, average maximum accelerations simulated by the method, relative error.
Data availability statement
The MATLAB code designed to predict the crowd-induced maximum acceleration is available on reasonable request to the corresponding author.