Figures & data
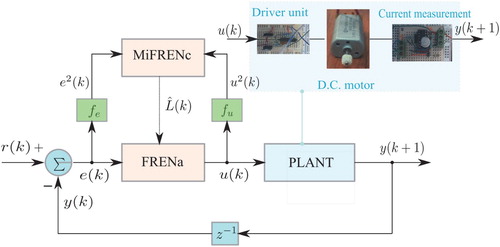
Figure 1. Closed-loop system architecture.
Table
Figure 2. Action network or controller based on FREN.
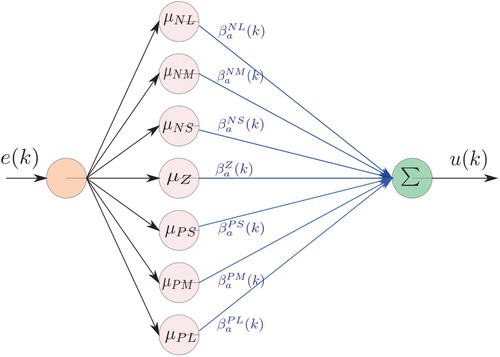
Figure 3. Estimated cost function or critic network.
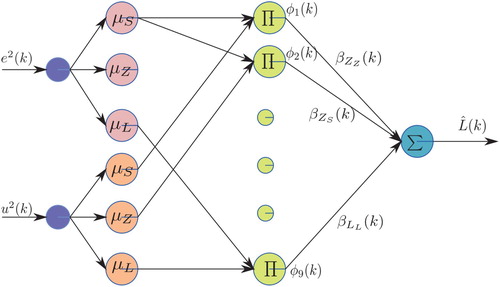
Table 1. MiFRENc: IF–THEN rules.
Figure 4. FRENa membership functions: simulation case.
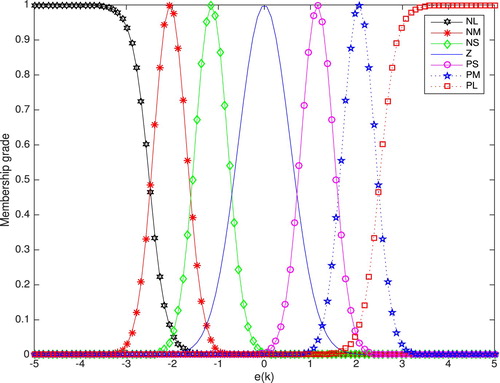
Figure 5. MiFRENc membership functions: simulation case.
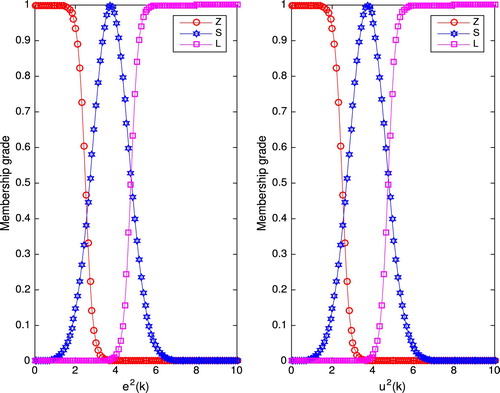
Table 2. Initial setting : simulation system.
Figure 6. Tracking performance and
: simulation system.
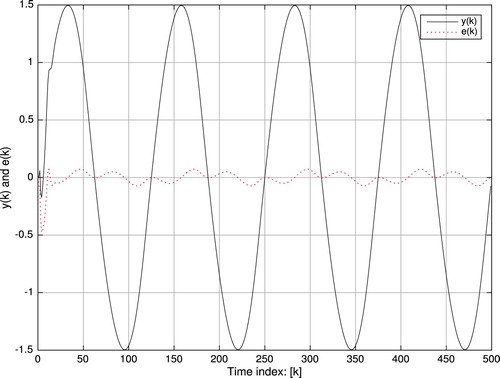
Figure 7. Control effort : simulation system.
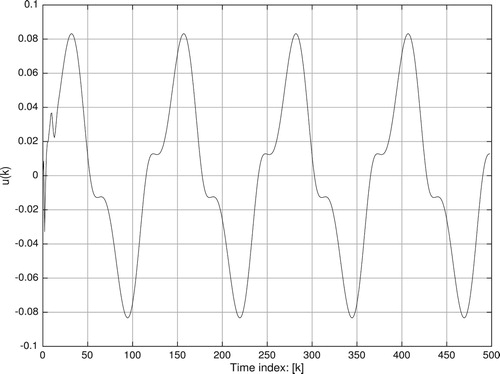
Figure 8. Estimated cost function : simulation system.
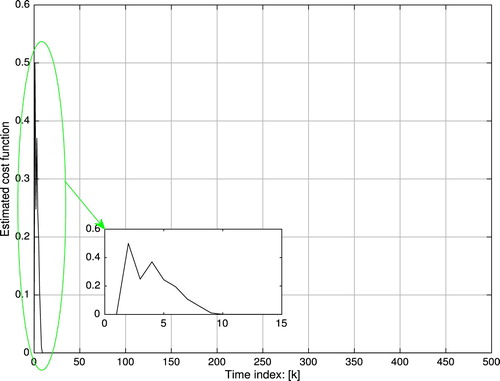
Figure 9. and
: simulation system.
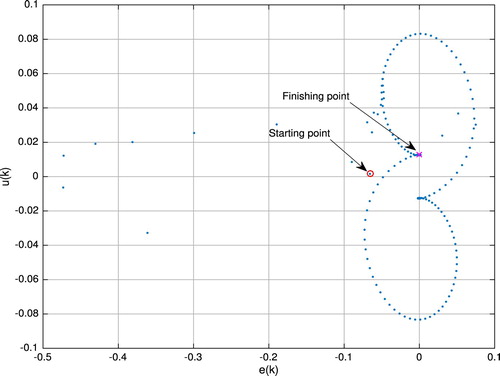
Figure 10. FRENa membership functions: experimental system.
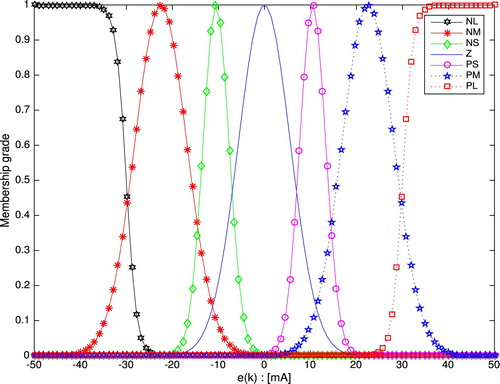
Figure 11. MiFRENc membership functions: experimental system.
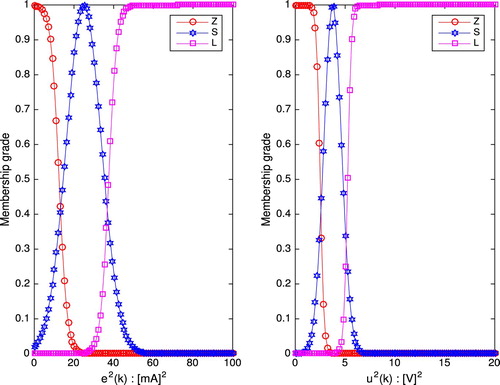
Table 3. Initial setting : experimental system.
Figure 12. Tracking performance and
: experimental system.
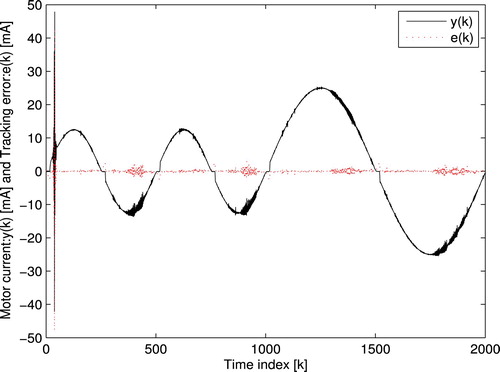
Figure 13. Control effort : experimental system.
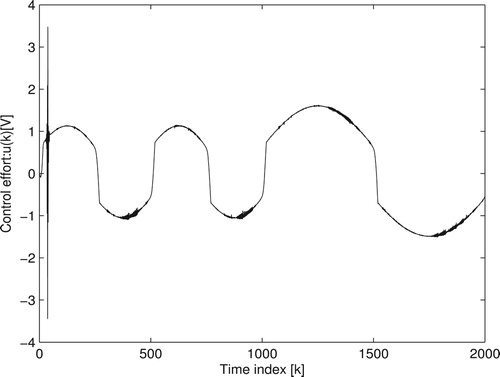
Figure 14. Estimated cost function : experimental system.
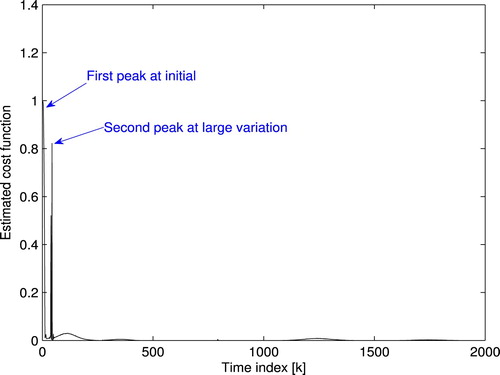
Figure 15. and
: experimental system.
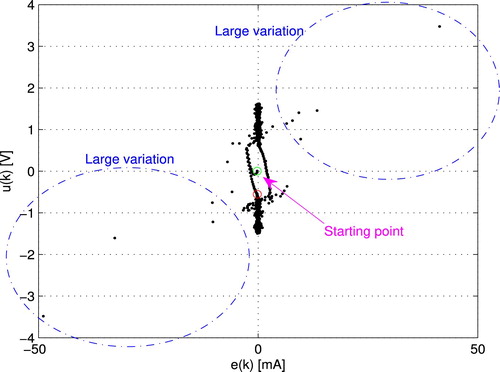
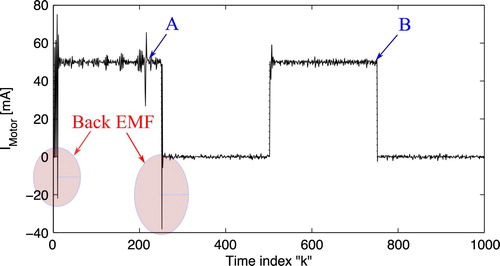
Figure 16. Pulse response: experimental system.