ABSTRACT
Presented in the paper is a procedure to extract kinetic models from geometric models (manufacturing device models) consisting of multiple components and joints. Since the geometric model of a manufacturing device does not contain the kinetic mechanism, it is necessary to define the kinetic model for the virtual factory simulation. The function of the kinetic model is to operate joints. Because most manufacturing device models in the virtual factory consist of two joints including a prismatic joint and a revolute joint, this paper presents an algorithm for just two joints. A joint is created by contacting two components, and most of the contact surfaces consist of cylinder shapes. To detect contact surfaces of geometric parts, we use the concept of parallel computing using a GPU (Graphic Process Unit). Detected contact surfaces can be classified as a cylinder shape using the Gauss map. And the joints can be defined from the center axis of the cylinder shape. To classify joints, we also use the center axis and the collision detection. The proposed procedure has been implemented and tested with a simple fixture model in automotive body assembly lines.
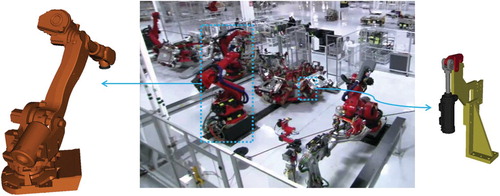
GRAPHICAL ABSTRACT