
Figures & data
Figure 1. The structure of SUNGUR 370.

Table 1. D-H parameters for robot manipulator.
Figure 2. Representing the position error.
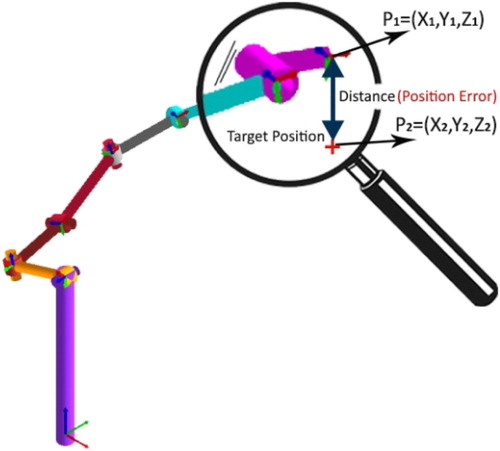
Figure 3. Determined position of the end effector for this study.
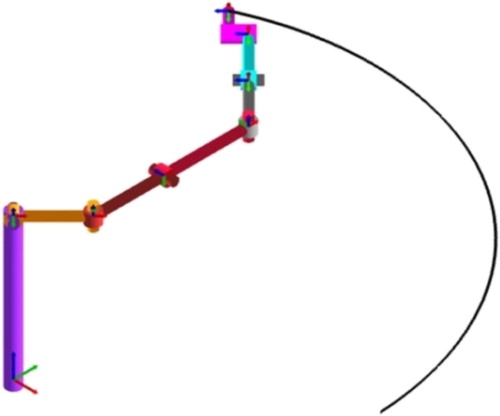
Figure 4. Flowchart of firefly algorithm.
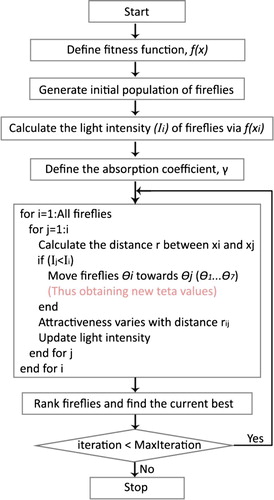
Table 2. Particle number, computation time and position error simulation results.
Table 3. The angle of the joints obtained by the number of particles.
Table 4. Positions of the end effector in work space.
Figure 5. Solving contribution of swarm numbers.
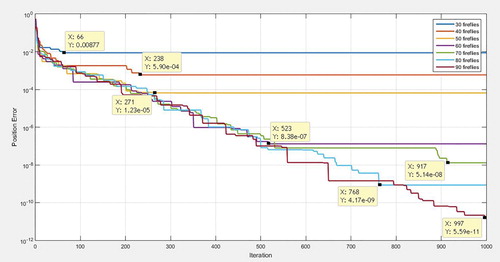
Figure 6. The graphic of computation time and position error.
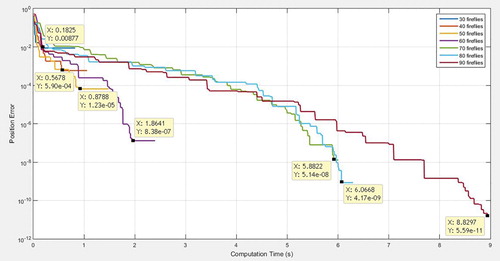
Figure 7. Final position of the 7-DOF manipulator according to the number of firefly.

Table 5. Comparative results of other techniques.
Figure 8. The graphic of computation time [Citation50].
![Figure 8. The graphic of computation time [Citation50].](/cms/asset/44b1a0bb-6375-46b8-88d8-9911e1516723/gipe_a_1602124_f0008_oc.jpg)
Figure 9. The graphic of position error (cm) and iteration [Citation50].
![Figure 9. The graphic of position error (cm) and iteration [Citation50].](/cms/asset/c7b0e800-1a38-4b06-a3ed-f126410c40b9/gipe_a_1602124_f0009_oc.jpg)