Figures & data
Figure 1. The hyperelastic body in its unloaded and deformed configurations.
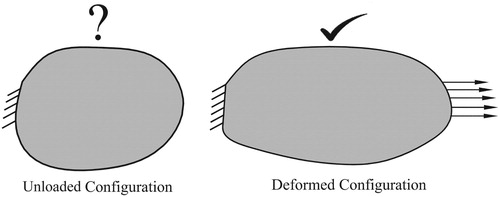
Figure 2. Interpolating the deformation gradient tensor at a node of the FE mesh.

Figure 3. Two consecutive calculated unloaded configurations.
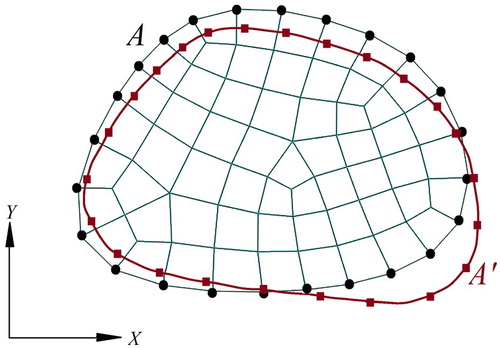
Figure 4. Dimensions of the hyperelastic body with fixed boundary conditions in its unloaded configuration.
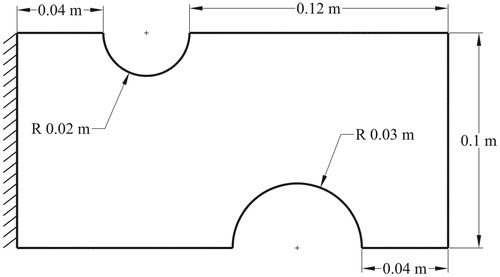
Figure 5. The unloaded, deformed and pre-calculated configurations of the body in the plane stress condition.
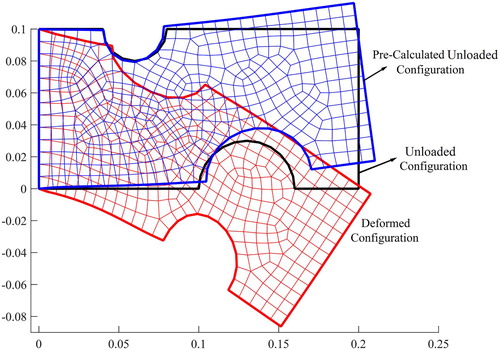
Figure 6. The unloaded, deformed and pre-calculated configurations of the body in plane strain condition.
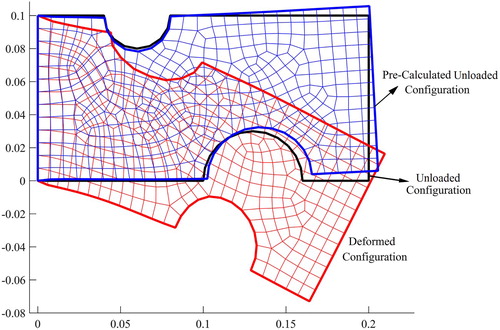
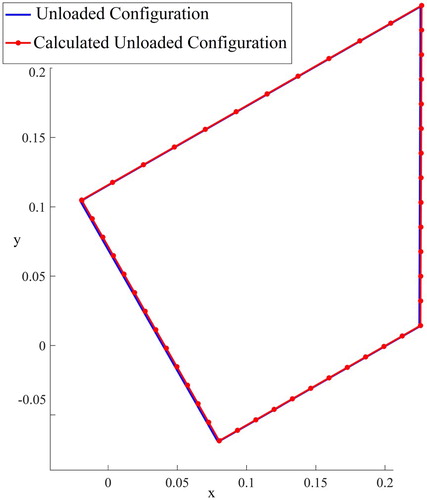
Figure 7. The recovered unloaded configuration in comparison with the exact one in (a) the plane stress condition, (b) the plane strain condition.
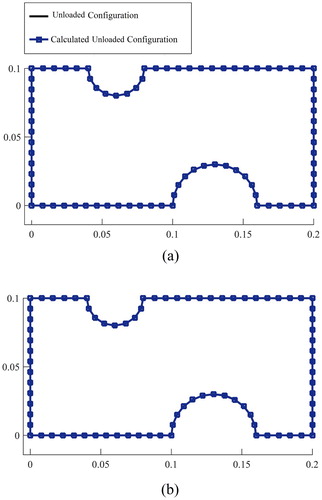
Table 1. The inverse problem results for plane stress and plane strain conditions.
Table 2. Results of the inverse problem for the plane strain case with different levels of added errors in the input data.
Figure 8. The unloaded configuration and calculated unloaded configuration together with deformed configurations of the body with 6% error and without error in the input data for the plane strain condition.
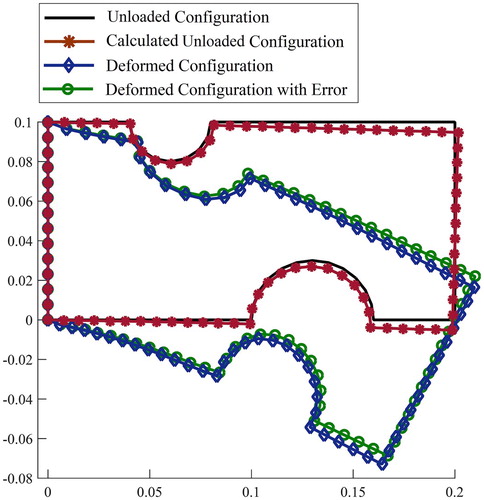
Figure 9. Dimensions of the silicone body.

Figure 10. The silicone body in the horizontal state.
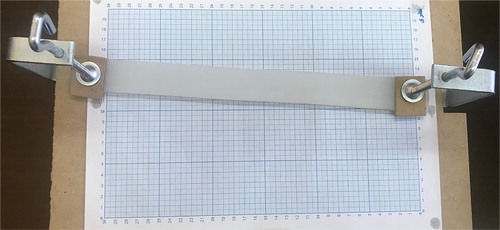
Figure 11. The silicone body in the vertical position.
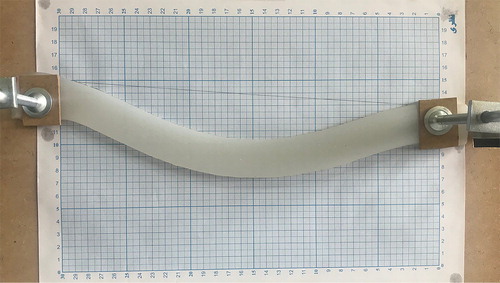
Figure 12. The deformed and pre-calculated configurations of the silicone body.
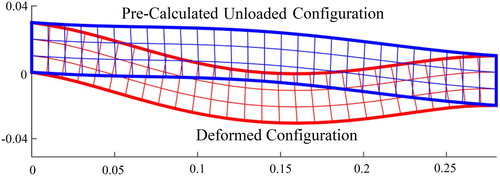
Figure 13. The unloaded, deformed, and calculated unloaded configurations of the silicone body.
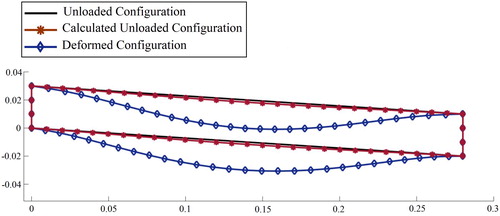
Figure 14. Dimensions and boundary conditions of the 3D hyperelastic body in its unloaded configuration, (a) side view, (b) 3D view.
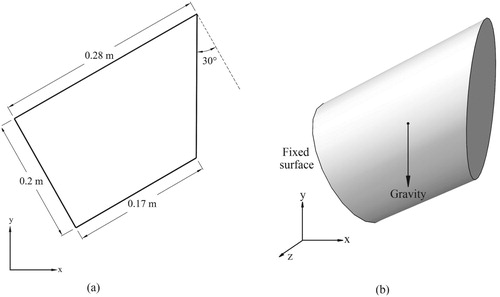
Figure 15. The unloaded, deformed and pre-calculated configurations of the body.
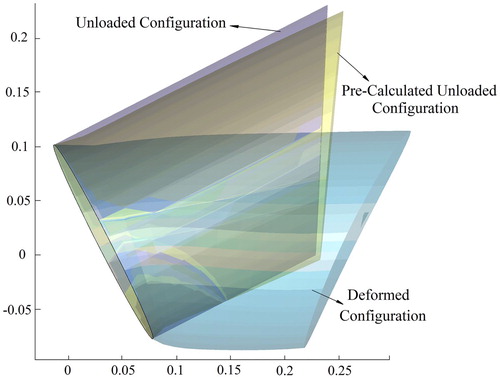
Figure 16. The recovered unloaded configuration in x-y plane in comparison to the exact unloaded configuration.