
Figures & data
Figure 1. The analytical and MFS numerical solutions for: (a) , (b)
, (c)
and (d)
, obtained when solving the direct problem for Example 1. Corresponding to the results for
,
,
and
, the maximum pointwise relative errors between the analytical and numerical MFS solutions are
,
,
and
, respectively.
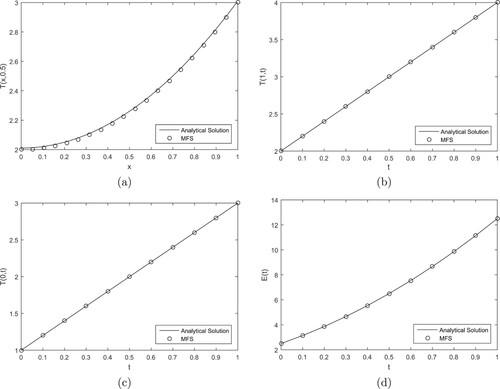
Figure 2. Estimated and the filtered boundary temperature measurements (Equation19
(19)
(19) ) contaminated with
noise, obtained using the particle filter with
particles for (a) and (c)
; (b) and (d)
, for Example 1.
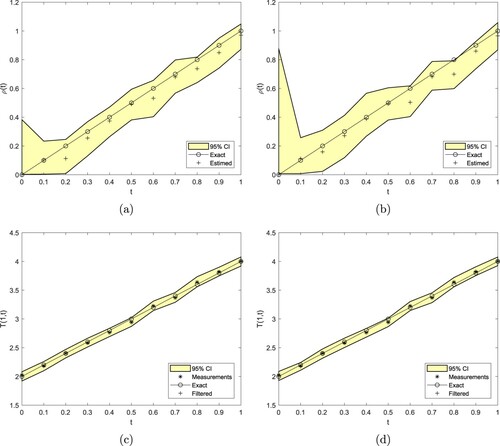
Table 1. Results for various for
noise in Equation (Equation19
(19)
(19) ) for Example 1.
Table 2. Results for noise in Equation (Equation19
(19)
(19) ) with
for Example 1.
Table 3. Results for noise in Equation (Equation20
(20)
(20) ) with
for Example 1.
Figure 3. Estimated and the filtered measurements (Equation20
(20)
(20) ) contaminated with
noise, obtained using the particle filter with
and
particles, for Example 1.
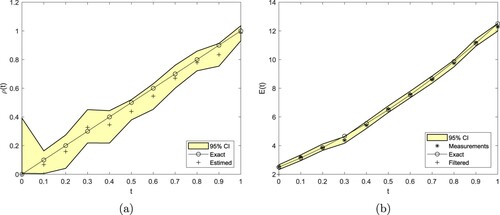
Figure 4. Estimated from the measurements (a) (Equation19
(19)
(19) ) or (b) (Equation20
(20)
(20) ) contaminated with
noise, as filtered in (c) and (d), respectively, obtained using the particle filter with
and
particles, for Example 1.
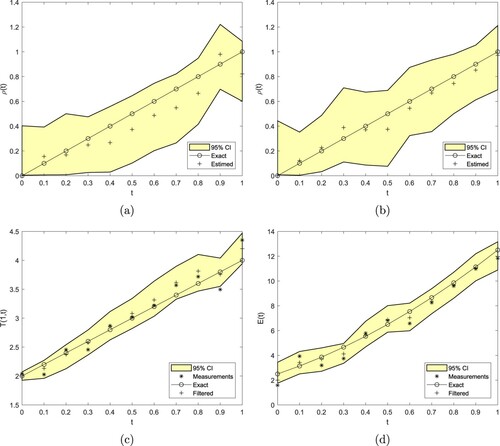
Figure 5. The variation of the MWCI over time for (a) and (b)
noise in Equation (Equation19
(19)
(19) ) or Equation (Equation20
(20)
(20) ), obtained using the particle filter with
and
particles, for Example 1.
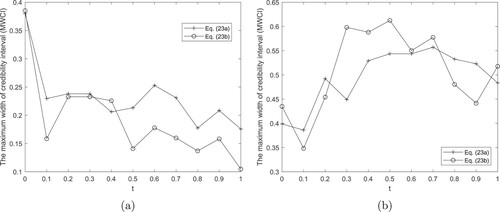
Figure 6. The analytical and MFS numerical solutions for: (a) , (b)
, (c)
, obtained when solving the direct problem for Example 2. Corresponding to the results for
,
and
, the maximum pointwise relative errors between the analytical and numerical MFS solutions are
,
and
, respectively.
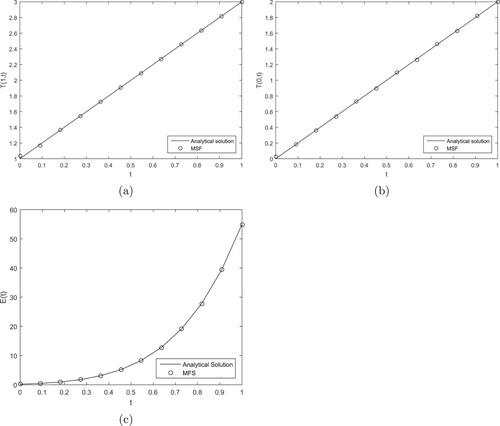
Figure 7. (a) Estimated from the measurements (Equation20
(20)
(20) ) with (a)
and (b)
noise, as filtered in (c) and (d), respectively, along with (e) the variation of the MWCI over time, obtained using the particle filter with
and
particles, for Example 2.
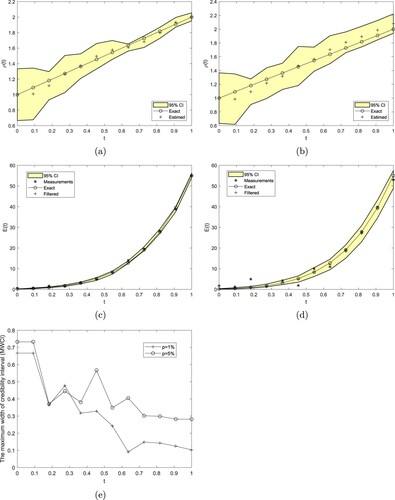
Table 4. Results for noise in Equation (Equation20
(20)
(20) ) with
for Example 2.