
Figures & data
Figure 1. MBES data coverage for individual surveys in the Bay of Fundy, Canada. Each colour group represents surveys collected by the same vessel, with different shades representing various years. Note that CSL Plover/CSL Heron data were obtained as a combined pre-processed grid. A more comprehensive list of individual backscatter mosaic coverages and their respective survey year is provided in the Main Map.
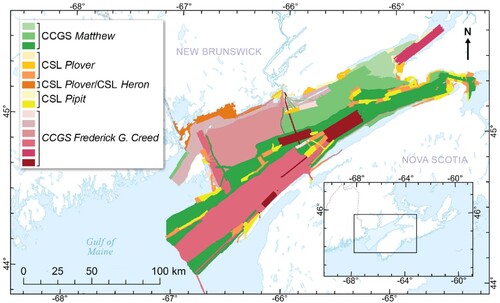
Table 1. Summary of surveys and multibeam echosounders used to collect data that were reprocessed and used in this study (CitationHughes Clarke et al., 2008; CitationParrot et al., 2010a, Citation2010b, Citation2010c, Citation2010d, Citation2010e; CitationParrott et al., 2013; CitationTodd et al., 2011b).
Figure 2. Summary of the multi-step bulk shift process used to create the final harmonized backscatter map for the Bay of Fundy. More comprehensive details on the harmonization order and model information for each bulk shift used to produce the harmonized backscatter mosaic can be found in the Supplementary Material S2.
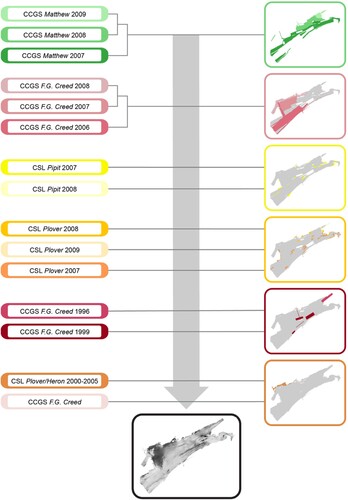
Figure 3. Line artefacts present in the CCGS Frederick G. Creed (a) were corrected using a modified bulk shift approach to produce a corrected mosaic (b).
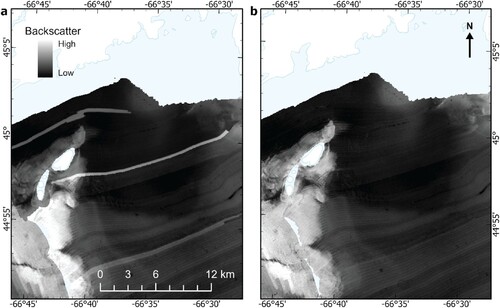
Figure 4. An intercept-only (i.e. ‘mean’) error model was used for harmonizing all same-system corrections such as the 2008 and 2009 CCGS Matthew data shown here. Backscatter measurements for two datasets are extracted at areas where raster cells overlap (a). Then, the mean backscatter error is calculated between datasets and is used to apply bulk corrections to the ‘shift’ dataset to produce a continuous mosaic (b).
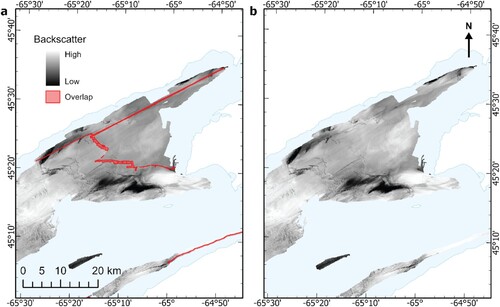
Figure 5. Linear relationship between depth and backscatter error (dB/m) for the Pipit 2007 data, compared to the combined CCGS Frederick G. Creed/Matthew data.
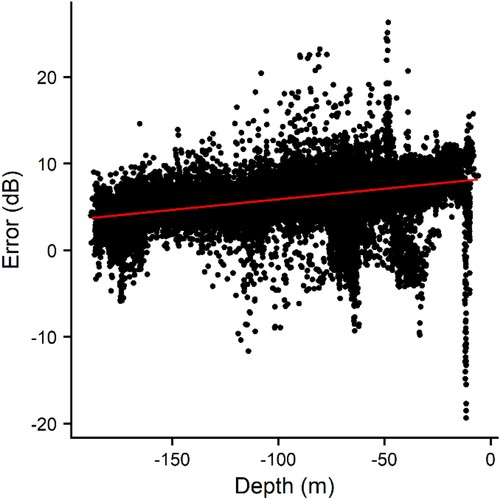
Figure 6. Data from a previous harmonized mosaic (a; CitationHughes Clarke et al., 2008) were incorporated where legacy data were unavailable. The linear bulk shift error model (b) rescales the data to match the ‘target’, even using values on arbitrary non-dB scales (e.g. 0-255). The regression line indicates the modelled error where the datasets overlap, which also varies as a function of water depth (indicated by the error band). Following correction, the datasets are mosaicked (c), and data distributions are compared between datasets at the area of overlap (d).
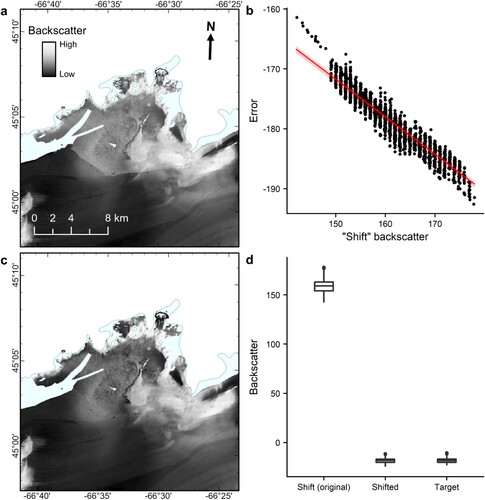
Figure 7. ‘Mixed sediment’ backscatter value distributions for each MBES dataset (a) before and (b) after bulk shift harmonization.
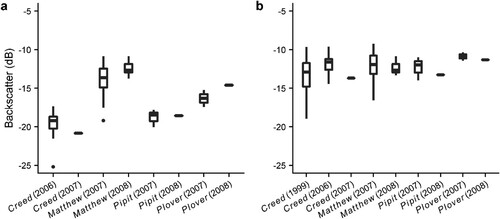
Table 2. Results of one-way randomization ANOVA tests for differences in backscatter between datasets for each seabed class.
Supplemental Material
Download MS Word (18.3 KB)FundyBulkshiftPoster_FINAL_NEWFeb2023.jpeg
Download JPEG Image (14.3 MB){kind=link}
Data availability
The authors confirm that all data supporting the results and analyses presented within the article are available upon reasonable request.