
Figures & data
Figure 1. Vertical angle determination.
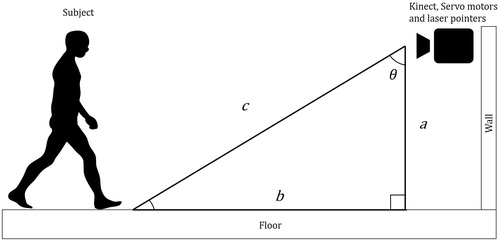
Figure 2. Horizontal angle determination (note that Kinect sees a mirrored image thus shoulders are reversed).
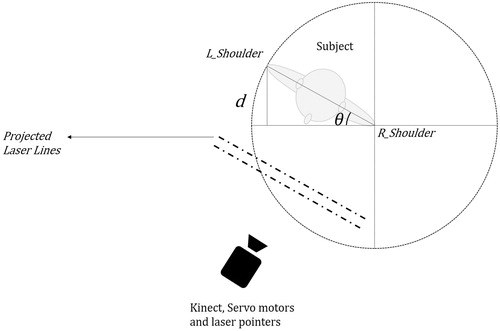
Figure 3. A view of the prototype system. The two servo motors controlling vertical and horizontal movement are on the left of the image (between the Kinect and lasers).
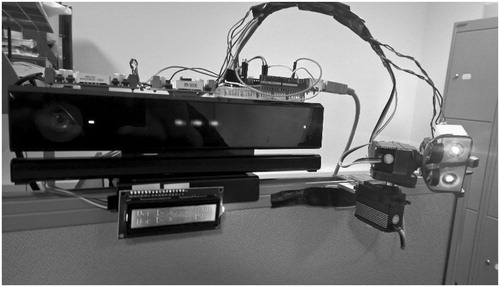
Figure 4. Graphical user interface for the developed software.
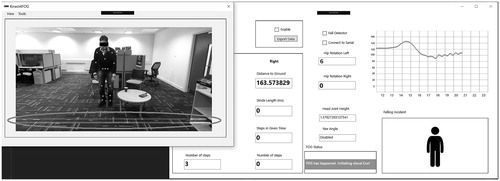
Figure 5. System’s companion smartphone application in action.
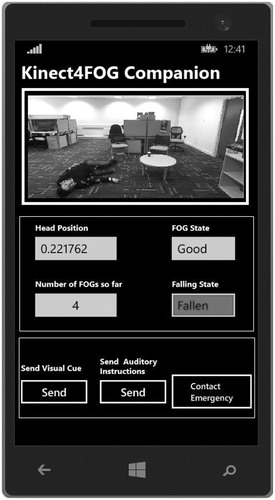
Figure 6. Network connection diagram including outgoing and incoming data packets over the internet.
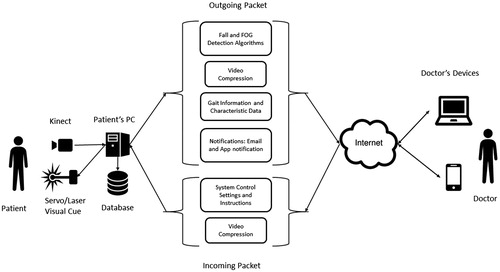
Table 1. Patients participants.
Figure 7. A PD patient volunteering to try out the system’s capabilities in detecting FOG. Visual cues are projected on the floor based on his whereabouts.
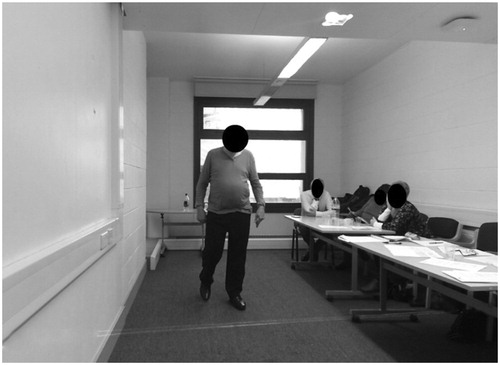
Table 2. Test subjects’ characteristics (n = 15; 12 males, 3 females).