Figures & data
Table 1. Participant characteristics.
Figure 1. The three individual foot position conditions (1–3). Condition 1 – the participant’s intact limb (black) is on the embedded forceplate (e) in the Neurocom Pro Balance Master (b), the individual’s prosthetic limb is standing on the force structure (d) which is resting on the embedded AMTI forceplate (c) in the floor (a). In condition 1, data from two forceplates are being collected: one set from the AMTI forceplate (STAT) (c) (prosthetic limb), and one set from the Neurocom forceplate (SWAY) (e) (intact limb). Condition 2 – the experimental conditions are the same but with reverse order of the intact and prosthetic limb (intact on the AMTI forceplate (c) and prosthetic on the Neurocom forceplate (e). In condition 2, data from two forceplates are being collected: one set from the AMTI forceplate (STAT) (c) (intact limb), and one set from the Neurocom forceplate (SWAY) (e) (prosthetic limb). Condition 3 – both limbs were on the Neurocom forceplate (e). In condition 2, data from one forceplate is being collected: the Neurocom forceplate (MIDDLE) (e) (resultant CoP from both limbs).
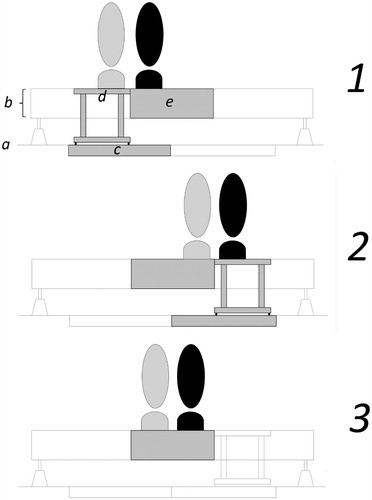
Figure 2. Data collection protocol. Each participant is tested in three-foot position conditions relating to which feet are on the Neurocom platform (both, intact and prosthetic). Coinciding with data collected from the Neurocom, was data collected from the AMTI at the same time. Whilst data from the intact foot on the Neurocom was collected (INTACTSWAY), data was also collected from the prosthetic limb on the AMTI forceplate (PROSSTAT). For each of these foot position conditions, a randomized order of sway reference gains was applied to the support surface (stable, unstable, very unstable). Sway reference gains applied (1:1, 2:1) refer to the amount of angular sway referencing applied per angular deviation of the CoG in the anteroposterior plane [Citation31].
![Figure 2. Data collection protocol. Each participant is tested in three-foot position conditions relating to which feet are on the Neurocom platform (both, intact and prosthetic). Coinciding with data collected from the Neurocom, was data collected from the AMTI at the same time. Whilst data from the intact foot on the Neurocom was collected (INTACTSWAY), data was also collected from the prosthetic limb on the AMTI forceplate (PROSSTAT). For each of these foot position conditions, a randomized order of sway reference gains was applied to the support surface (stable, unstable, very unstable). Sway reference gains applied (1:1, 2:1) refer to the amount of angular sway referencing applied per angular deviation of the CoG in the anteroposterior plane [Citation31].](/cms/asset/3e1ff22a-1ef3-4785-bc23-6b121868cc43/iidt_a_1498925_f0002_b.jpg)
Table 2. Mean difference and 95% CI of the difference for left-right (CON-Group) and intact-prosthetic side (TPU-Group) for each of the support surface conditions.
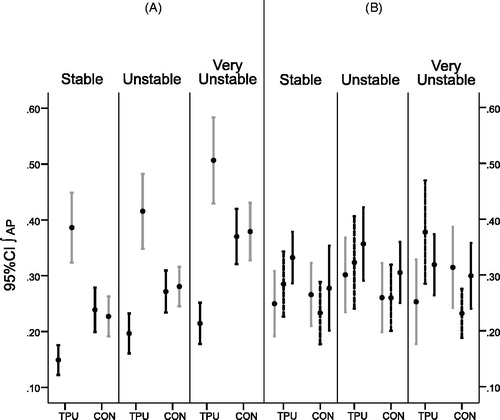
Figure 3. 95% CI of the anteroposterior CoP position for the STAT conditions (left – A) and the SWAY conditions (right – B) separated by support surface condition (stable, unstable, very unstable). Transtibial prosthesis users (TPU) group: Black lines indicate prosthetic limb, grey lines indicate intact limb, broken lines indicate middle position (for SWAY conditions (B) only). Control (CON) group: Black lines indicate left limb, grey lines indicate right limb, broken lines indicate middle position (for SWAY conditions (B) only). All units in meters (m).
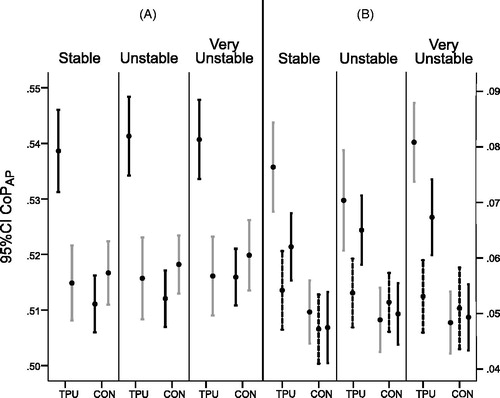
Figure 4. 95% CI of the mean GRF amplitude for the STAT conditions in the anteroposterior direction (left – A) and mediolateral direction (right – B) separated by support surface condition (stable, unstable, very unstable). Transtibial prosthesis users (TPU) group: Black lines indicate prosthetic limb and grey lines indicate intact limb. Control (CON) group: Black lines indicate left limb and grey lines indicate right limb. All units in newtons (N).
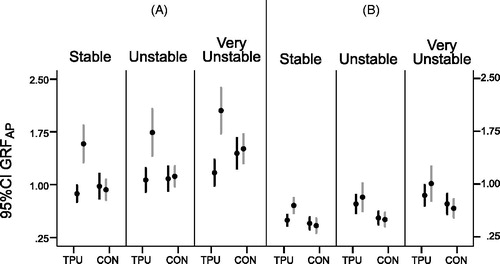
Figure 5. 95% CI of the mean GRFZ amplitude for the STAT conditions separated by support surface condition (stable, unstable, very unstable). Transtibial prosthesis users (TPU) group: Black lines indicate prosthetic limb and grey lines indicate intact limb. Control (CON) group: Black lines indicate left limb and grey lines indicate right limb. All units in newtons (N).
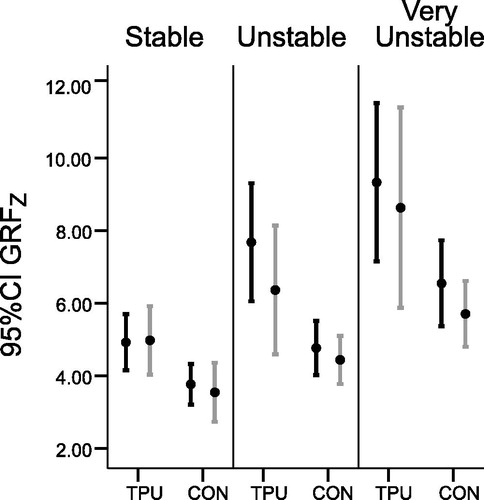
Figure 6. 95% CI of the anteroposterior CoP integral for the STAT conditions (left – A) and the SWAY conditions (right – B) separated by support surface condition (stable, unstable and very unstable). Transtibial prosthesis users (TPU) group: Black lines indicate prosthetic limb, grey lines indicate intact limb, broken lines indicate middle position (for SWAY conditions (B) only). Control (CON) group: Black lines indicate left limb, grey lines indicate right limb, broken lines indicate middle position (for SWAY conditions (B) only). All units in arbitrary units (a.u.).