Figures & data
Figure 1. Schematic representation of the model. Note that all rates are dependent on the variable for the group from which they originate (Colour online).
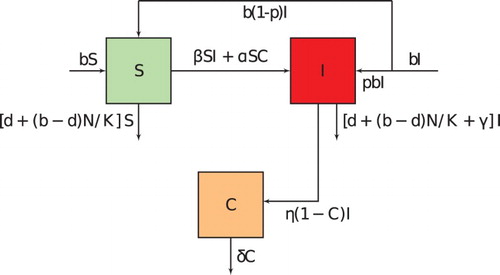
Table 1. Parameter values for ovine brucellosis and their descriptions.
Table 2. Sensitivity indices of  and to the parameters of the model in Table .
and to the parameters of the model in Table .
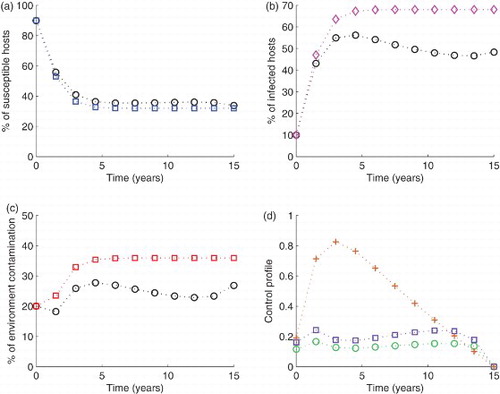
Figure 2. Simulation of the model with The blue circled line in (a), the pink diamond line in (b) and the red squared line in (c) show the model run in the absence of any control effort. In the same figures (i.e. (a), (b) and (c)), the circled black lines represent the variables run in the presence of control efforts described. In subfigure (d), the green circles are for control
purple square for
, and brown cross are for
. Other parameter values are given in Table (Colour online).
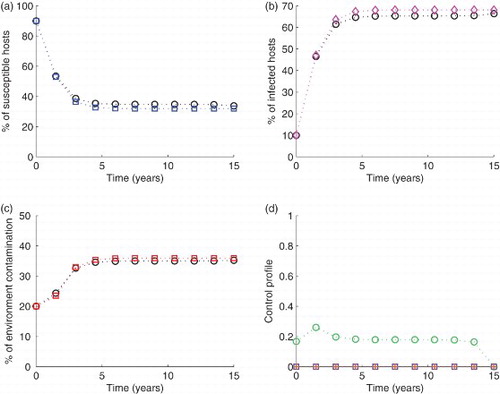
Figure 3. Simulation of the model with The blue circled line in (a), the pink diamond line in (b) and the red squared line in (c) show the model run in the absence of any control effort. In the same figures (i.e. (a), (b) and (c)), the circled black lines represent the variables run in the presence of control efforts described. In subfigure (d), the green circles are for control
, purple square for
, and brown cross are for
. Other parameter values are given in Table (Colour online).
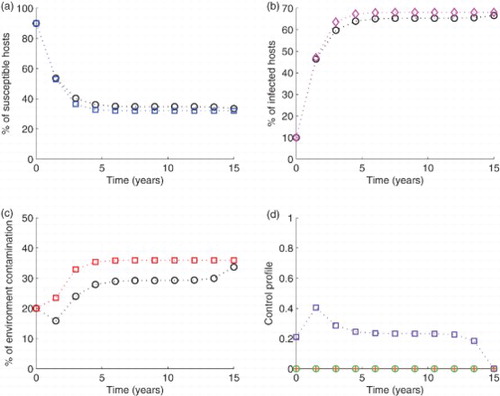
Figure 4. Simulation of the model with The blue circled line in (a), the pink diamond line in (b) and the red squared line in (c) show the model run in the absence of any control effort. In the same figures (i.e. (a), (b) and (c)), the circled black lines represent the variables run in the presence of control efforts described. In subfigure (d), the green circles are for control
, purple square for
, and brown cross are for
. Other parameter values are given in Table (Colour online).
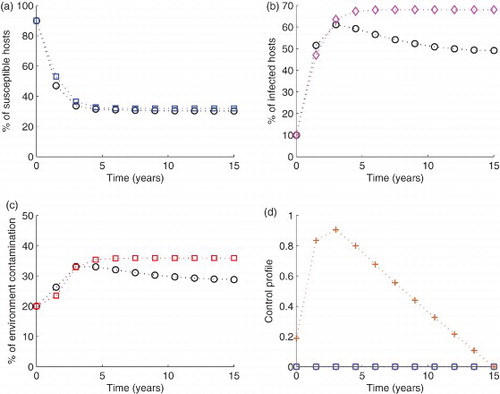
Figure 5. Simulation of the model with The blue circled line in (a), the pink diamond line in (b) and the red squared line in (c) show the model run in the absence of any control effort. In the same figures (i.e. (a), (b) and (c)), the circled black lines represent the variables run in the presence of control efforts described. In subfigure (d), the green circles are for control
, purple square for
, and brown cross are for
. Other parameter values are given in Table (Colour online).
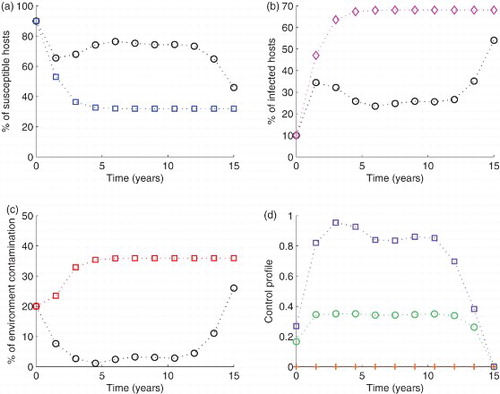
Figure 6. Simulation of the model with The blue circled line in (a), the pink diamond line in (b) and the red squared line in (c) show the model run in the absence of any control effort. In the same figures (i.e. (a), (b) and (c)), the circled black lines represent the variables run in the presence of control efforts described. In subfigure (d), the green circles are for control
, purple square for
, and brown cross are for
. Other parameter values are given in Table (Colour online).
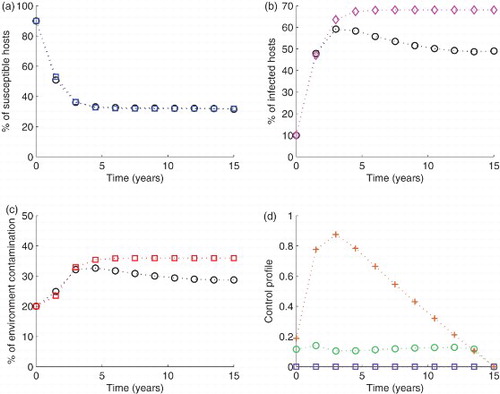
Figure 7. Simulation of the model with The blue circled line in (a), the pink diamond line in (b) and the red squared line in (c) show the model run in the absence of any control effort. In the same figures (i.e. (a), (b) and (c)), the circled black lines represent the variables run in the presence of control efforts described. In subfigure (d), the green circles are for control
, purple square for
, and brown cross are for
. Other parameter values are given in Table (Colour online).
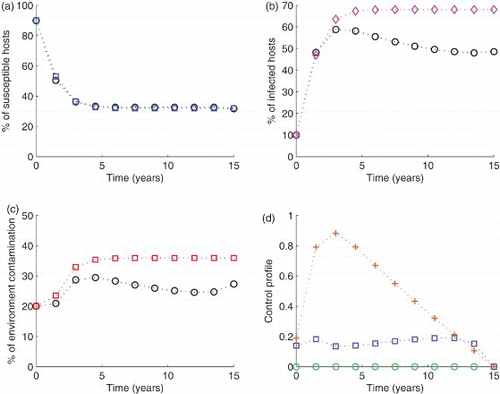
Figure 8. Simulation of the model with The blue circled line in (a), the pink diamond line in (b) and the red squared line in (c) show the model run in the absence of any control effort. In the same figures (i.e. (a), (b) and (c)), the circled black lines represent the variables run in the presence of control efforts described. In subfigure (d), the green circles are for control
, purple square for
, and brown cross are for
. Other parameter values are given in Table (Colour online).