Figures & data
Figure 1. Comparison of the travelling wave solution ρ with the leading order approximation at time t=10 in the logistic growth example. The inset graph shows a ‘zoomed-in’ plot of the leading order approximation
(red dashed) and the numerical non-homogenized solution ρ (black). The main graph shows the numerical non-homogenized solution (black curve) and the upper and lower bound obtained from the homogenized solution. The top red curve is the upper bound g while the bottom red curve is the lower bound g/k. The parameters are
,
,
, and
(k=3).
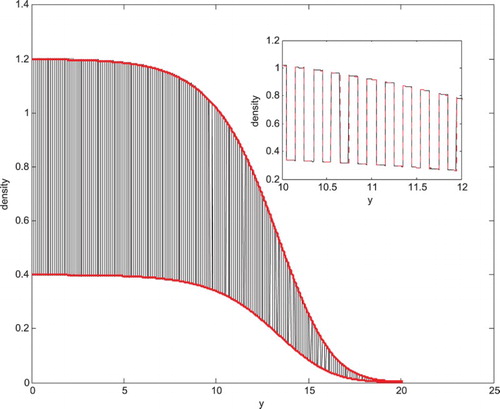
Figure 2. The effect of varying on the accuracy of the leading order approximation of the travelling wave profile. In plots (a–d)
and the numerical non-homogenized solution ρ (black) and leading order approximation
(red) are plotted as a function of the scaled spatial variable ξ (left column) and the unscaled spatial variable x (right column). The first row corresponds to the case where
andthere is greater preference for patch 2. The second row corresponds to the case where
and there is greater preference for patch 1. Finally, plot (e) shows the maximum absolute error (
) as
is varied. Plot (f) shows the averaged absolute error across rescaled space ξ. In all cases we ignore population dynamics with
and
and
. We use a Gaussian initial condition and compare solutions at t=3.
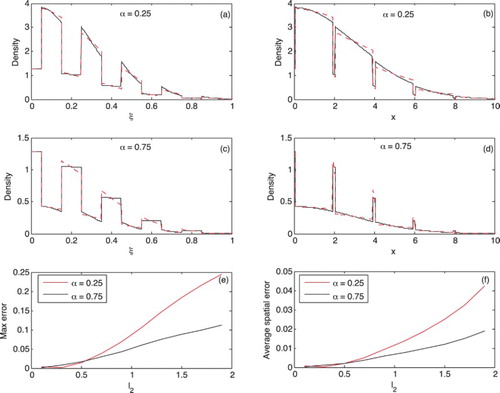
Figure 3. Asymptotic wave speed plotted as a function of patch preference, α. The solid line illustrates the homogenized wave speed prediction (Equation Equation79(79)
(79) ) in the case
, and the dashed line illustrates the case
,
. The grey stars are the numerically simulated wave speeds obtained from solving the original non-homogenized Equations (Equation2
(2)
(2) ), (Equation3
(3)
(3) ), (Equation7
(7)
(7) ). The solution was solved until t=50, and the last 30 time steps were used to estimate wave speed, taking a threshold of 0.01 to track the location of the wave front at each time point. In all cases the population dynamics are given by logistic growth (
), and parameters are
,
and
.