Figures & data
Figure 1. Compartmental diagram of the abundance-replanting model (Equation2.3(2.1b)
(2.1b) ). The plant and vector susceptible compartments (Healthy Plants, Non-Infective Vectors) are coloured blue, while their infected compartments (Infected Plants, Infective Vectors) are coloured red. The solid lines indicate the compartment into which a new infection or transfer occurs, while the dotted lines indicate the compartments which are implicitly involved in a given new infection or transfer.
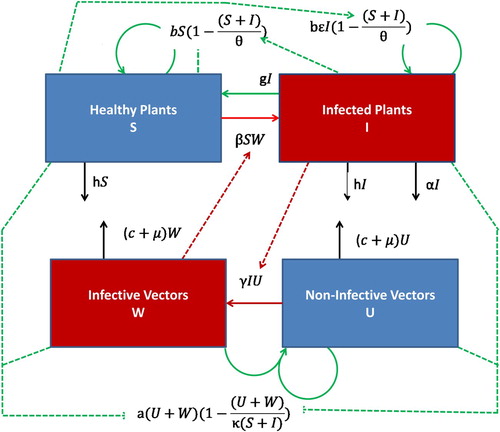
Table 1. Abundance (i.e. density) is measured in numbers per unit area.
Table 2. Parameters and their baseline values as in [Citation14].
Figure 2. The impact on the abundance at equilibrium of healthy cassava plants (solid line) and infected cassava plants (dashed line) with respect to change in parameters, and α. In the top figures α and in the bottom figures c+μ are fixed at their baseline values given in Table . The plots in the first column are for the case
, plots in the middle column are for the case of abundance-replanting with
. The plots in the last column are for frequency-replanting with
.
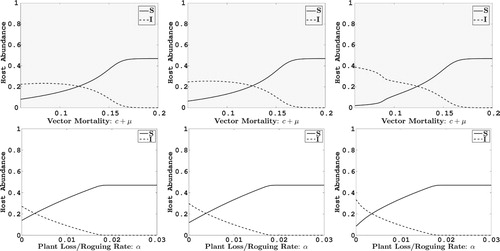
Figure 3. The impact on the abundance at equilibrium of healthy cassava plants (solid line) and infected cassava plants (dashed line) with respect to change in parameters and α. In the top figures α, and in the bottom figures c+μ are fixed at their baseline values given in Table . The plots in the first column are for the case
, plots in the middle column are for the case of abundance-replanting with
. The plots in the last column are for frequency-replanting with
.
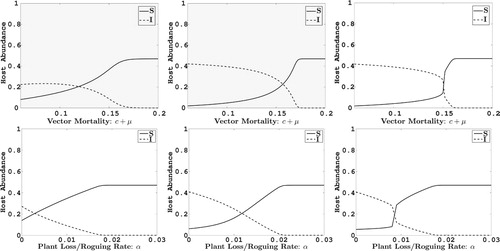
Figure 4. For the abundance-replanting model, the region where the values of the basic reproduction number, , are less than or greater than one are graphed in parameter space as a function of roguing α and vector mortality
with (Left Plot)
, (Middle Plot)
, (Right Plot)
. In the frequency-replanting model,
is not dependent on ε. Thus,
is graphed in the left Plot (same for all values of ε).
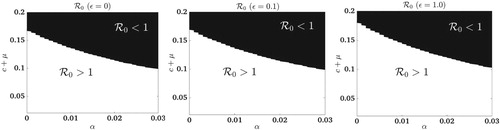
Figure 5. Frequency, equilibrium initial conditions, : (Top row) Optimal control results for roguing (
) and vector control through insecticides (
) for frequency-replanting for the cases of no control, only roguing (α), only vector control through insecticides (c), and roguing and vector control (α and c). (Bottom two rows) Optimally controlled system response in the four cases considered for roguing (
) and vector control (
) for frequency-replanting. The cases of roguing (α), insecticide (c), and roguing and insecticide (α and c) combined are contrasted with the uncontrolled system response.
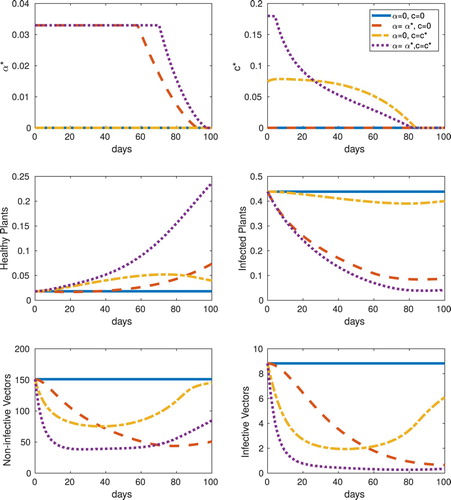
Figure 6. Abundance, equilibrium initial conditions, : Optimal control results for abundance-replanting for the cases of no control, only roguing (α), only vector control (c), and both roguing and vector control (α and c). Optimally controlled system response in the four cases considered for roguing (
) and vector control (
) for abundance-replanting. The cases of roguing (α only), insecticide (c only), and both roguing and insecticide (α and c) combined are contrasted with the uncontrolled system response.
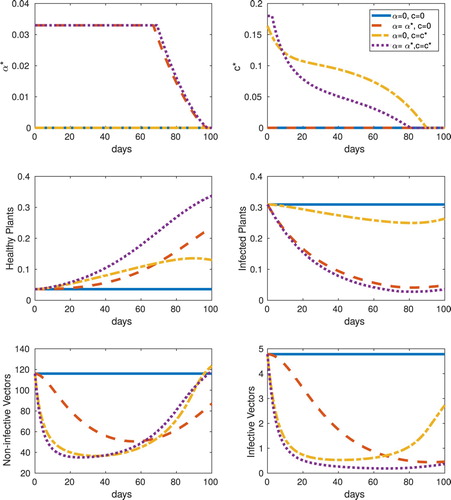
Table 3. Optimal control results for the baseline case.
Figure 7. Frequency (top) and abundance (bottom) with equilibrium initial conditions: Optimal controls for different values of the parameter ε. In the results for the abundance-replanting model, as ε increases the optimal control also increase. However, this is not the case in the results for the frequency-replanting model.
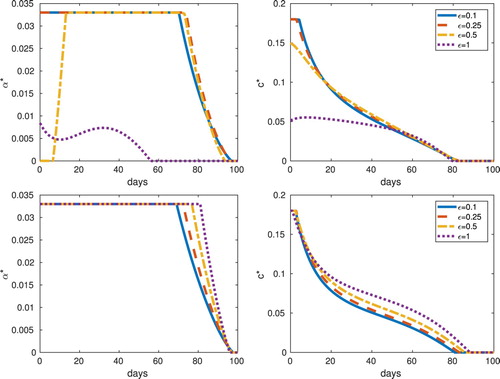
Table 4. Equilibrium solutions for various values of ε for frequency-replanting and abundance-replanting models.
Figure 8. Frequency (top), abundance (bottom), non-equilibrium initial conditions: Optimal controls, and
for different values of ε.
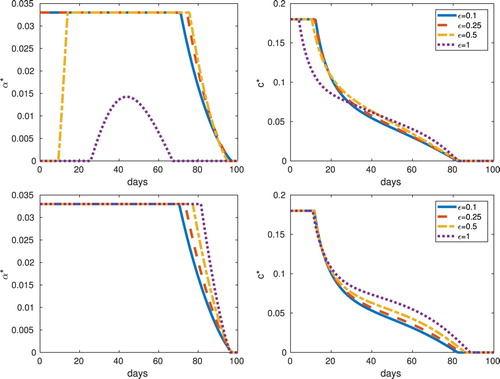
Table 5. Optimal control results for roguing and insecticide control using various values of the selection parameter ε.
Figure A1. Graphs of (dashed curve) and
(solid curve), given by Equations (Equation3.9a
(3.9a)
(3.9a) )–(Equation3.9b
(3.9b)
(3.9b) ), for the baseline parameter values in Table , except
and α. The α values and the EE in (a)
,
, (b)
,
, and
, (c)
,
, and (d)
,
In (a)–(d), there exists a unique locally stable EE (blue circle) but in (b), there exist two locally stable EE (blue circle) separated by an unstable EE (green asterisk). Note the change in shape of the curve
when α increases from 0.007 in (a) to 0.008 in (b).
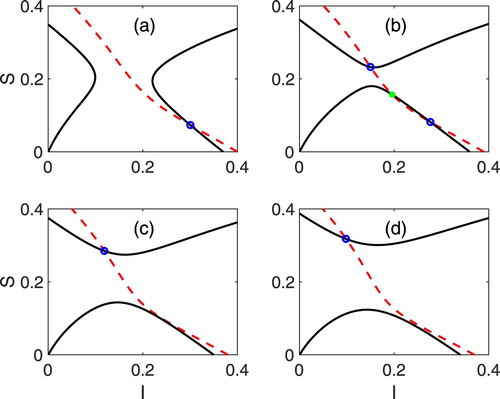
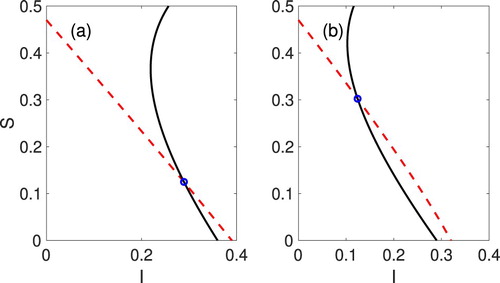
Figure A2. Graphs of (dashed curve) and
(solid curve), given by Equations (Equation3.10a
(3.10a)
(3.10a) )–(Equation3.10b
(3.10b)
(3.10b) ), for all of the baseline parameter values in Table , except for
and α. The α values and the locally stable EE (blue circle) in (a)
,
and (b)
,
.