Figures & data
Table 1. Biological meanings of parameters involved in system (Equation1(1)
(1) ) and their values used for numerical simulations.
Figure 1. Variations of prey (first column) and predator (second column) densities in system (Equation1(1)
(1) ) with respect to (a) k, (b) m and (c) A. Rest of the parameters are at the same values as in Table .
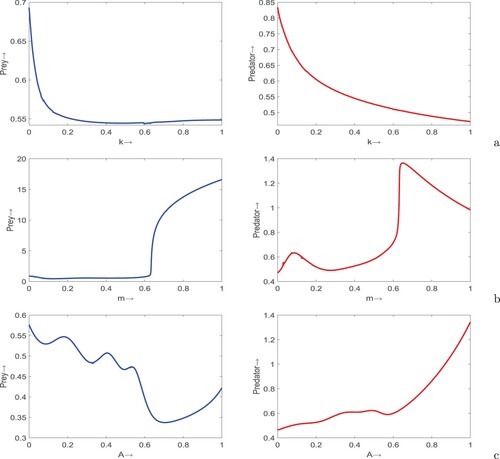
Figure 2. Surface plots of prey (first column) and predator (second column) populations in system (Equation1(1)
(1) ) with respect to (a) m and k, (b) A and k, and (c) A and m. Rest of the parameters are at the same values as in Table .
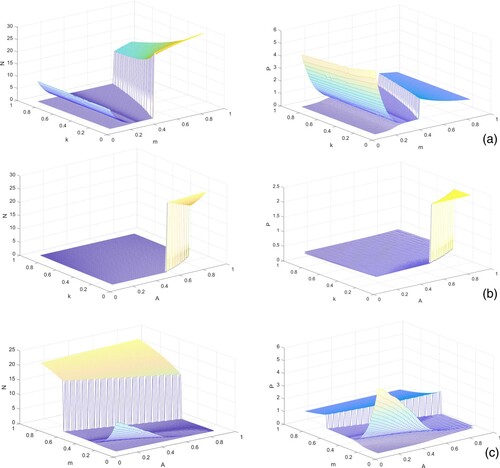
Figure 3. (a) Semi-relative sensitivity and (b) logarithmic sensitivity solutions of system (Equation1(1)
(1) ) with respect to k, m and A. Parameters are at the same values as in Table except m = 0.9 and A = 0.7.
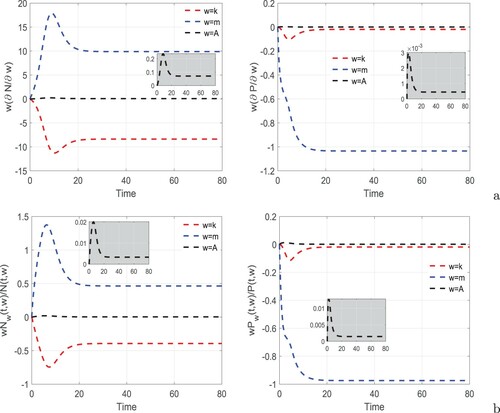
Figure 4. Phase portraits of system (Equation1(1)
(1) ) for
,
,
and
. Rest of the parameters are at the same values as in Table except in (a)
, k = m = A = 0, (b)
, k = 10, m = A = 0, (c)
, m = 0.13, k = A = 0, and (d)
,
,
, A = 7, k = m = 0.
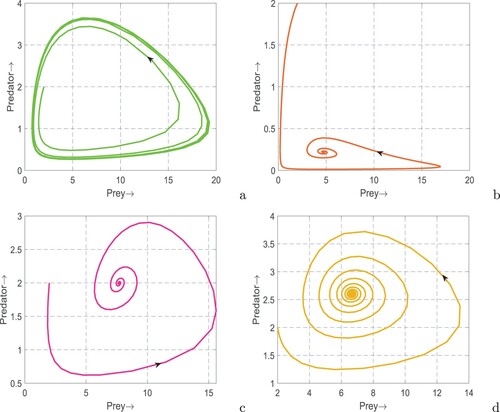
Figure 5. Phase portraits of system (Equation1(1)
(1) ). Parameters are at the same values as in Table except in (a) m = 0.2, (b) k = 0.01, m = 0.2,
,
, (c) m = 0.4 and (d) m = 0.2, A = 0.5.
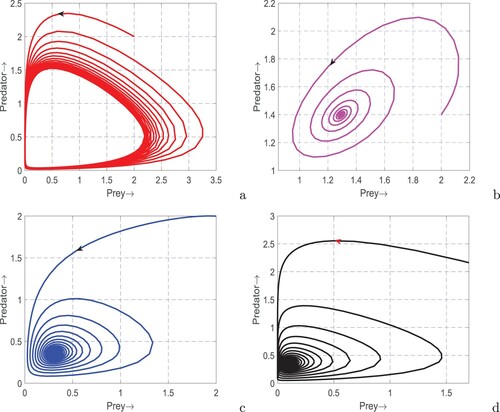
Figure 6. Bifurcation diagram of system (Equation1(1)
(1) ) with respect to (a) k, (b) m and (c) A. Rest of the parameters are at the same values as in Table except in (a)
,
, m = 0.2 and (c) m = 0.2.
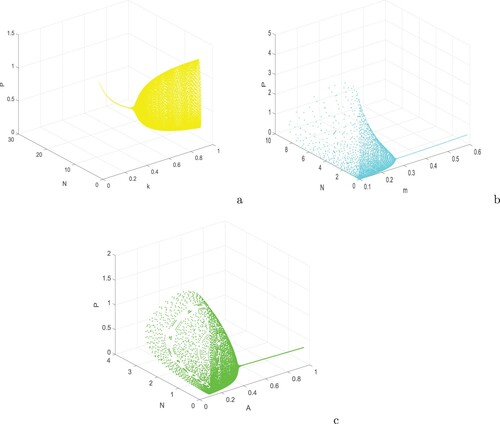
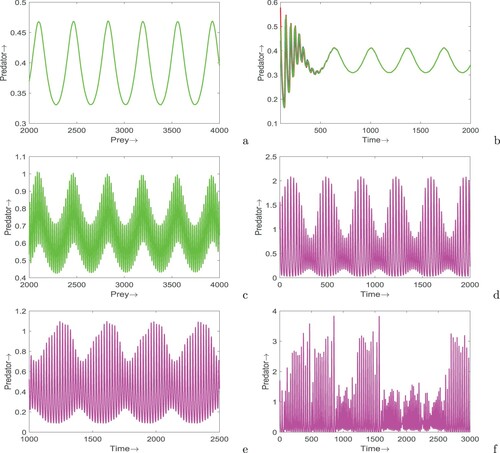
Figure 7. Time series of system (Equation12(12)
(12) ) for different values of τ: (a)
, (b)
, (c)
and (d)
. Parameters are at the same values as in Table , and the initial conditions are chosen as (2, 1).
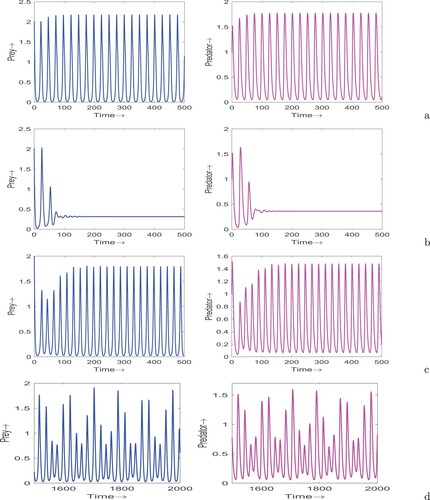
Figure 8. Time series of system (Equation12(12)
(12) ) for different values of τ: (a)
, (b)
, (c)
and (d)
. Parameters are at the same values as in Figure (a), which shows oscillating behaviour of system (Equation1
(1)
(1) ).
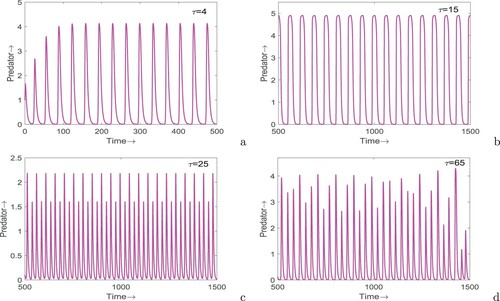
Figure 9. Bifurcation diagram of system (Equation12(12)
(12) ) with respect to τ. Parameters are at the same values as in Table .
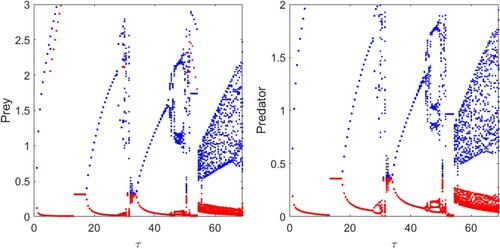
Figure 10. Stability regions for the system (Equation12(12)
(12) ) in (a)
and (b)
planes. Here, blue regions represent the stable coexistence equilibrium for corresponding values of the parameters and green regions represent otherwise. Rest of the parameters are at the same values as in Table .
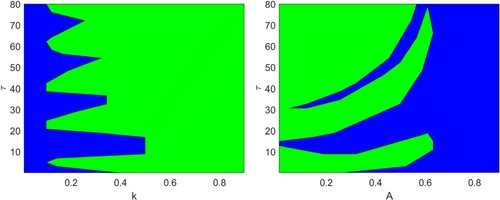
Figure 11. Maximum Lyapunov exponent of the system (Equation12(12)
(12) ) at
. Parameters are at the same values as in Table , and the initial conditions are chosen as (2, 1). In the figure, positive values of the maximum Lyapunov exponent confirm the occurrence of chaotic oscillation.
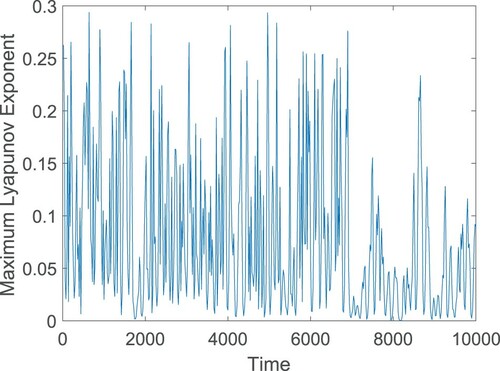
Figure 12. Time series solutions of system (Equation51(51)
(51) ) in the absence as well as presence of time delay. Parameters are at the same values as in Table ,
except in (a)
, A = 0.6,
, (b)
, m = 0.2, A = 0.6,
, (c) k = 0.8,
,
, m = 0.2,
,
, (d)
,
, (e) k = 0.4,
,
and (f)
, m = 0.2,
.