
Figures & data
Table 1. Parameters and meaning – predator-prey model with disease in the first prey.
Figure 1. (a) This graph shows that the solution curve of deterministic (Equation2(2)
(2) ) and stochastic system (Equation4
(4)
(4) ) with large noise
and (b) small noise
.
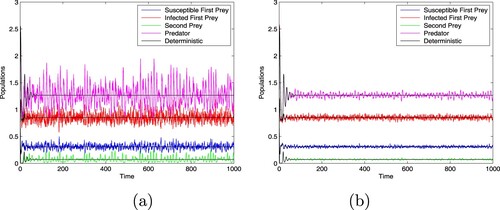
Figure 2. (a) This graph shows that the species of system (Equation2(2)
(2) ) and (Equation4
(4)
(4) ) goes to extinction and (b) each species in both system goes to permanent.
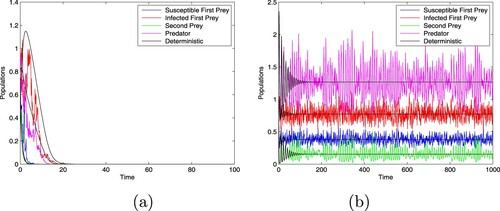
Figure 3. This graph shows the stochastic stability of the system (Equation4(4)
(4) ) around the positive equilibrium with different initial values and
.
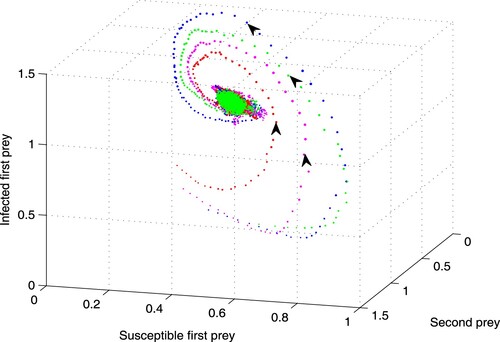
Figure 4. The phase trajectories clearly shows the stochastic stability of individual species in the system (Equation4(4)
(4) ) with different initial values and with the noise
converges to the region where the positive equilibrium occur.
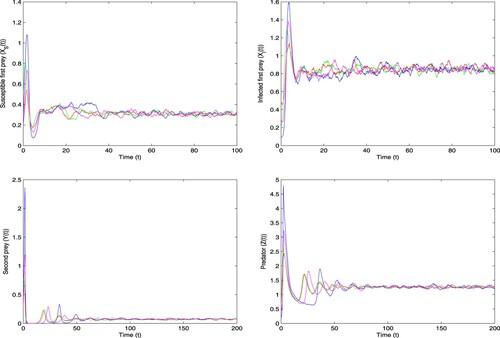
Figure 5. The left panel shows the solution trajectories of both deterministic and stochastic systems from one simulation run; the right panel shows the stationary distribution of each species in the system (Equation4(4)
(4) ) separately from 10,000 simulation runs with intensity of noise
.
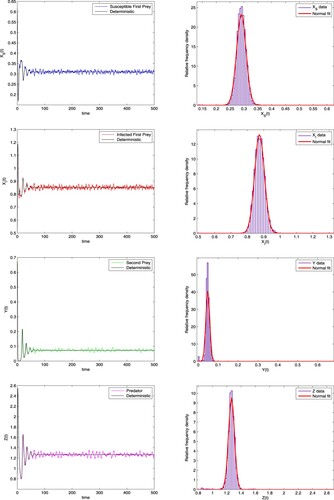
Figure 6. The left panel represents the solution trajectories of both system from one simulation run; the right panel represents the stationary distribution of each species in the system (Equation4(4)
(4) ) separately from 10,000 simulation run with intensity of noise
.
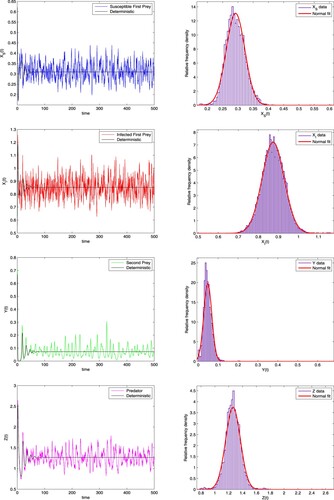
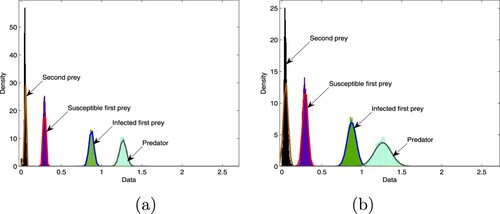
Figure 7. (a) This graph presents the distribution of all species of system (Equation4(4)
(4) ) in one picture with intensity of small noise
and (b) large noise
.
Data availability statement
Our paper contains numerical experimental results, and values for these experiments are included in the paper. The data is freely available.