Figures & data
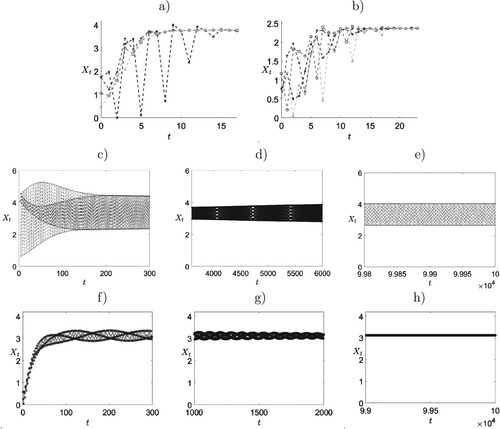
Figure 1. Orbit diagram for (Equation14(14)
(14) ) created with Matlab [Citation23]. (a) We plotted the last 1000 values of a total of 51000 iterations for randomly chosen positive initial conditions.
denotes the limiting behaviour of the simulated orbit. For small delay, there does not appear to be a stable equilibrium. Increasing the delay sufficiently, stabilizes a positive equilibrium. However, as predicted by Theorem 3.5, increasing the delay beyond
results in extinction. (b) We plotted the last 100 values of a total of
iterations for
to demonstrate the type of dynamics that can occur when the positive equilibrium loses stability.
![Figure 1. Orbit diagram for (Equation14(14) Xt+1=Xt1+∑i=03aiXti+rXt−τ1+∑i=03ci(τ)Xt−τi(14) ) created with Matlab [Citation23]. (a) We plotted the last 1000 values of a total of 51000 iterations for randomly chosen positive initial conditions. X∞ denotes the limiting behaviour of the simulated orbit. For small delay, there does not appear to be a stable equilibrium. Increasing the delay sufficiently, stabilizes a positive equilibrium. However, as predicted by Theorem 3.5, increasing the delay beyond τc results in extinction. (b) We plotted the last 100 values of a total of 107 iterations for τ∈{35,36,…,55} to demonstrate the type of dynamics that can occur when the positive equilibrium loses stability.](/cms/asset/708067aa-8dc3-43f2-8d5a-cb35eb71c8ff/tjbd_a_2244987_f0001_oc.jpg)
Figure 2. Solutions of (Equation23(23)
(23) ) with parameter values
,
,
,
, and
for different positive initial conditions. In (a),
. As predicted by Theorem 4.5, for
, all solutions converge to the unique positive equilibrium. In (b),
. Solutions converge to the only non-negative equilibrium
, as predicted by Theorem 4.3, although the convergence appears to be slow.
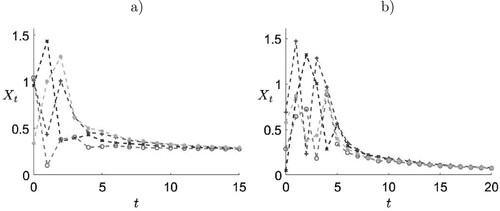
Figure 3. Solutions of (Equation33(33)
(33) ). In all cases the initial conditions were generated randomly. (a)–(b) The parameter values are
For the given parameter values
In (a),
, resulting in
. In (b),
, resulting in
. In both cases, solutions converge to
, as predicted by Theorem 4.15(i). In (c)–(e) parameter values are
and
. Here,
and
. Theorem 4.15(ii) predicts that
is unstable. The solution converges to a period two cycle. (f)–(h) The parameter values are
,
. Here,
,
, and
. Thus,
and Theorem 4.15 is inconclusive. However, the simulation shows convergence to
.