Figures & data
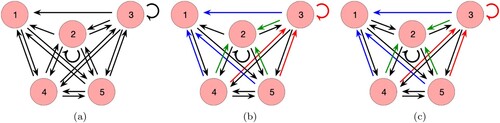
Figure 1. Graphical representations of structured systems and symmetric structures. (a) Robust structured system corresponding to Equation (Equation2(2)
(2) ), or equivalently, relation (Equation6
(6)
(6) ). (b) Removing two edges results in a fragile system corresponding to relations (Equation6
(6)
(6) ) and (Equation7
(7)
(7) ). (c) A symmetric structure, as discussed in Section 4. Blue pairs and green pairs are matched Jacobian entries.
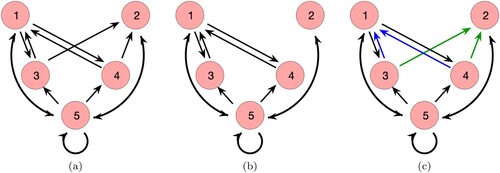
Figure 2. The directed graph that corresponds to the Competitive Exclusion Principle. A model of two species that depend only on a single third species has only nonrobust solutions.
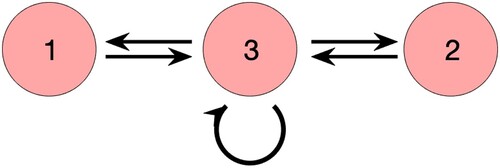
Figure 3. Graphical representations of structured systems and symmetric structures. (a) Robust structured system corresponding to relations (Equation9(9)
(9) ). (b) Robust system in (a) is changed to fragile symmetric system when some edges are identified, corresponding to system (Equation10
(10)
(10) ). Blue, green and red triples are matched Jacobian entries. (c) With an added edge from node 1 to node 2, robustness is restored in the symmetric structure.