
Figures & data
Figure 1. Composition of the hardware of the UAV-RTDS.
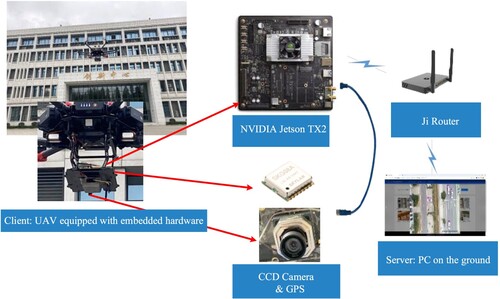
Figure 2. Overall framework and operational principle of the UAV-RTRS.
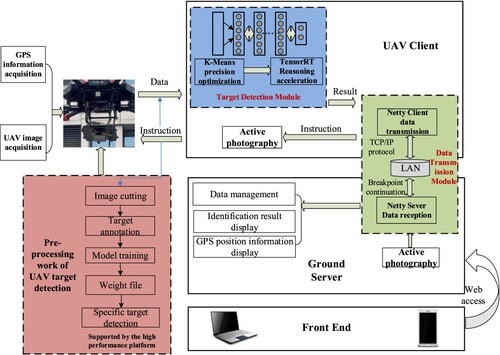
Table 1. Comparison of performance between TX2 and an ordinary PC.
Table 2. Comparison of times taken by the original YOLOv4 algorithm on an ordinary PC and the TX2.
Figure 3. Flowchart of optimization of the YOLOv4 algorithm based on the K-Means algorithm.
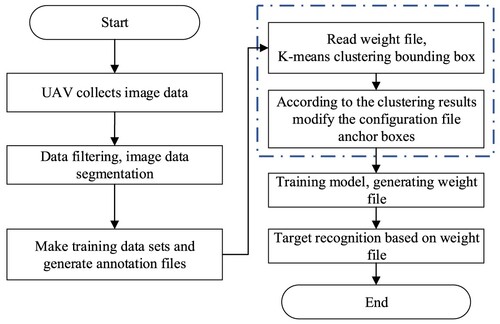
Figure 4. Flowchart of the TensorRT optimization algorithm.
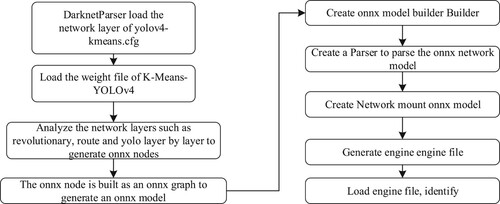
Figure 5. Data transmission format.
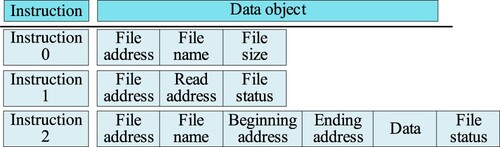
Figure 6. Sequence diagram of the interaction between client and server.
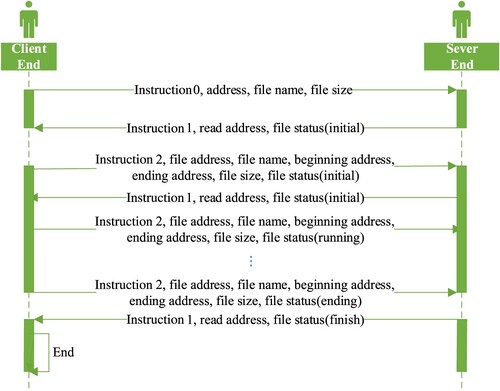
Figure 7. Client end of the DTM based on the producer–consumer model.
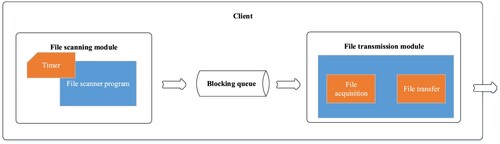
Figure 8. Structure and composition of modules of the UAV MSS.
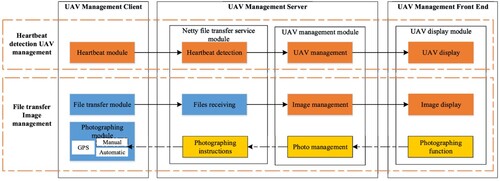
Figure 9. Flowchart of the automatic and manual photography modes.
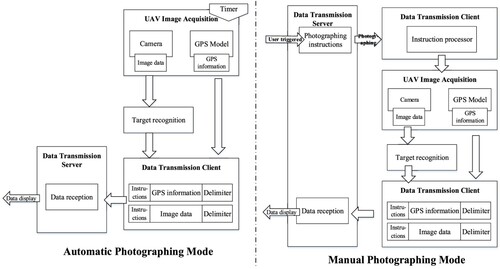
Table 3. Partial pseudocode of the UAV transmission client.
Table 4. Pseudocode of the photography instructions received by the UAV client.
Table 5. Pseudocode for the implementation of the GPS module.
Figure 10. Concept diagram of the MVC mode.
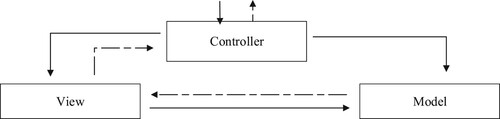
Table 6. Pseudocode of the implementation of the front-end page.
Figure 11. System homepage.

Figure 12. Page displaying the list of UAVs.
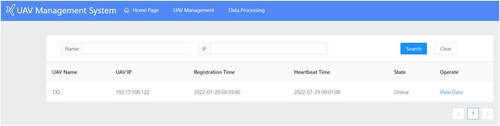
Figure 13. Page displaying details of the images acquired by the UAV.
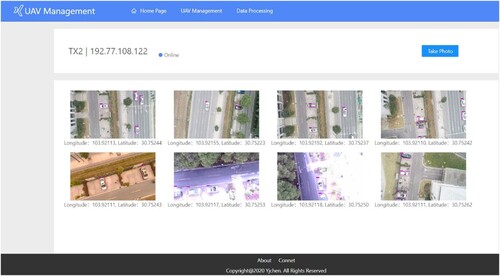
Figure 14. Changes in the loss value of the K-YOLOv4 algorithm with increasing number of iterations.
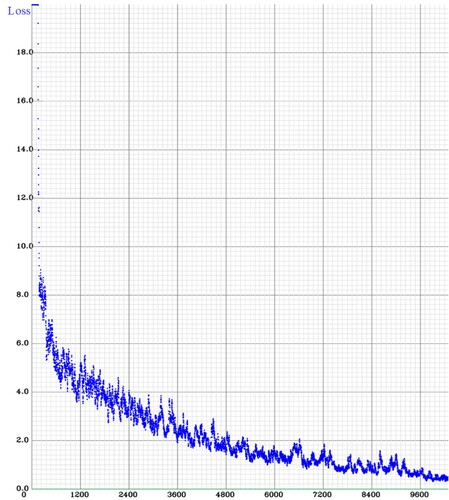
Table 7. Performance of K-YOLOv4 in comparison with other algorithms on the same dataset.
Table 8. Comparison between K-YOLOv4 and the other algorithms on same dataset.
Figure 15. Comparison of the results of detection of YOLOv4 before and after optimization.
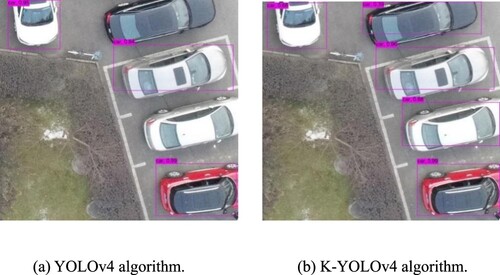
Table 9. Comparison of CUDA acceleration times between the YOLOv4 and the K-YOLOv4 algorithms.
Table 10. Comparison of times consumed by the K-YOLOv4 algorithm before and after optimization.
Table 11. Comparison of the precision and speed of the optimized proposed method with K-YOLOv4, YOLOv4-Tiny, and YOLOv4-MobileNetV3.
Figure 16. Ratio of acceleration before and after the optimization of the K-YOLOv4 algorithm.
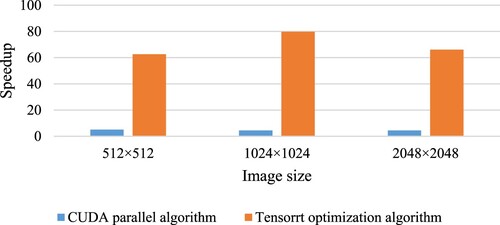
Table 12. Software configuration of the test environment.
Figure 17. Overview of the experimental site and the experimental devices.

Figure 18. Fixed-point detection by the UAV at a height of 30 m.
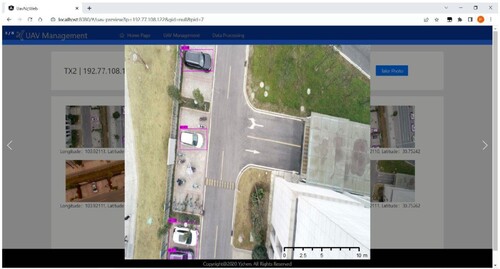
Figure 19. Target detection by the UAV based on the manual photography mode at an altitude of 30 m.
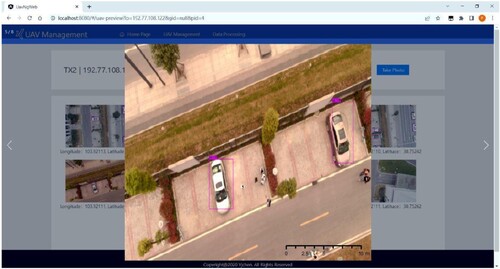
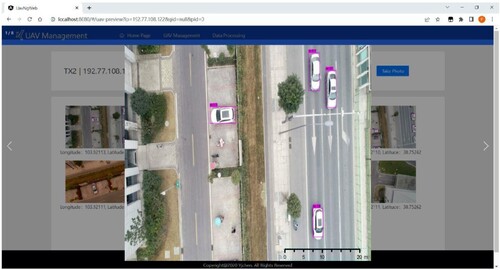
Figure 20. Detection of moving vehicle by the UAV based on automatic photography at a height of 60 m.
Data availability statement
Data are openly available in a public repository that does not issue DOIs, the website is: https://github.com/MatlabChen/UAV-RTDS.