
Figures & data
Figure 1. Overview of the study area: (a) the geographic location of the study area; (b) ZY-3 true-color composited image; (c) Luojia-1 nighttime light image; and (d) road networks.
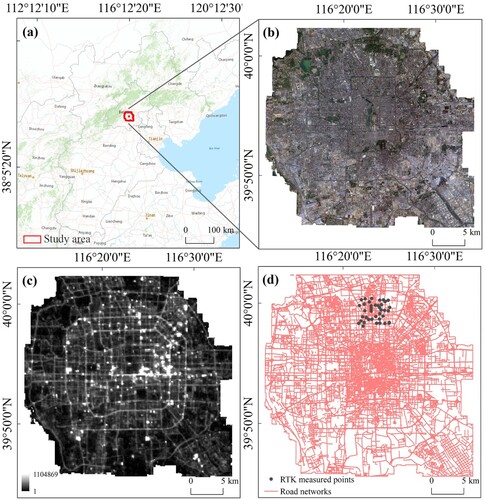
Table 1. Satellite parameters of ZY-3 and Luojia-1 imageries (note that PAN refers to panchromatic and MS multi-spectral).
Figure 2. Proposed workflow of the LCZ mapping.
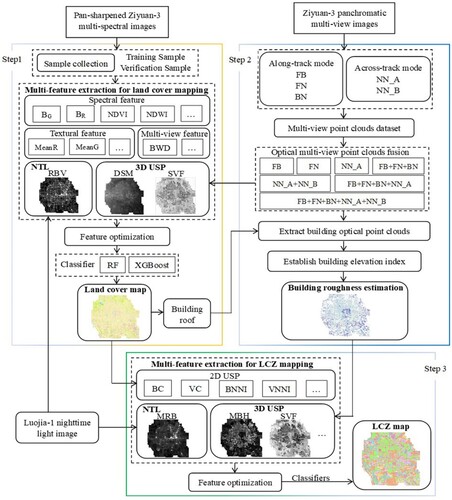
Table 2. Multi-feature extraction for land cover mapping.
Table 3. Multi-feature extraction for LCZ mapping.
Table 4. Experiments used for LCZ mapping.
Figure 3. Variable importance ranking for land cover mapping revealed by the RF algorithm.
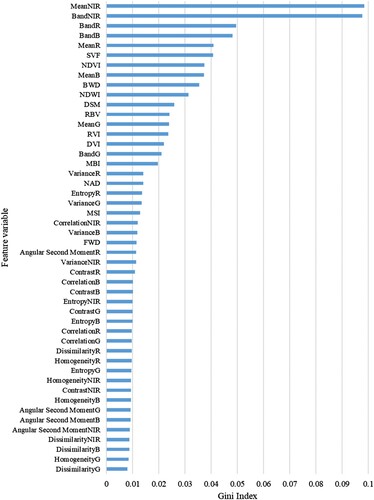
Table 5. Comparison of the performances of RF and XGBoost algorithms in land cover mapping. Note that the kappa coefficient, OA, PA, and UA represent a measure of classification accuracy, overall accuracy, producer’s accuracy, and user’s accuracy, respectively.
Figure 4. Comparison of classification details by using the two classifiers: (a) RF classifier, (b) XGBoost classifier, (c) regions of interest c, (d) regions of interest d. Building outlines, vegetation information and water bodies, and human editing processes produced the comprehensive ‘reference model’.
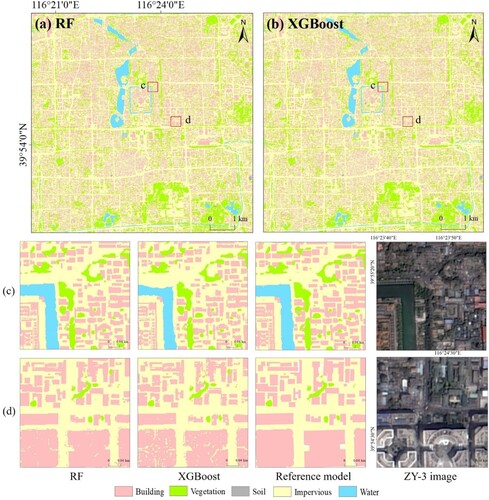
Figure 5. Characteristics of ZY-3 along- and across-track point clouds: (a) NN_A (nadir01 + nadir02), (b) FB (forward + backward), (c) FN (forward + nadir01), (d) false-color composite image, and (e) the number of multi-view point clouds in different land covers.
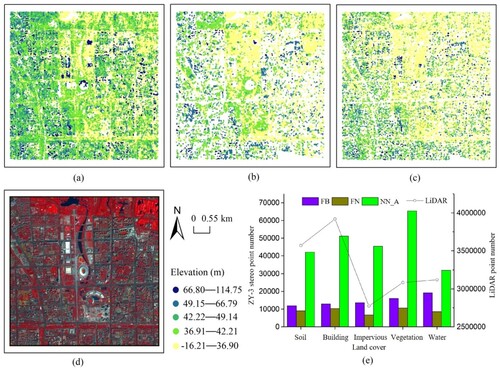
Table 6. Changes in R2 value, RMSE value, and building number under varying threshold settings.
Figure 6. Building roughness estimation.
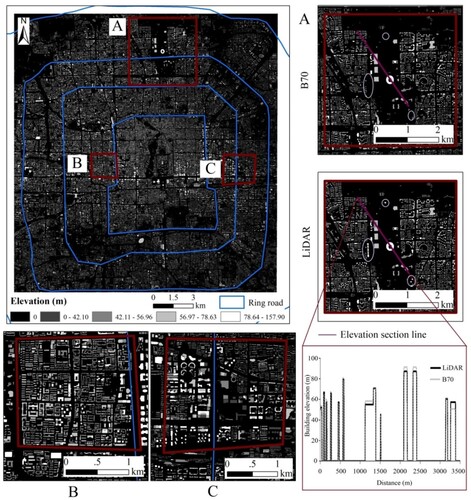
Figure 7. Variable importance ranking for LCZ mapping revealed by the RF algorithm.
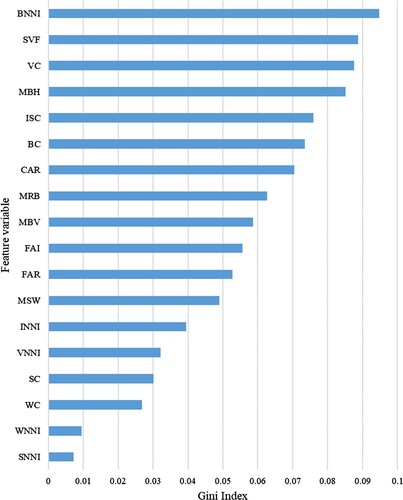
Table 7. A comparison of using RF and XGBoost algorithms in LCZ mapping.
Figure 8. Comparison of classification details by using the two classifiers. (a) RF classifier-study area, (b) XGBoost classifier-study area, (c) regions of interest c, (d) regions of interest d.
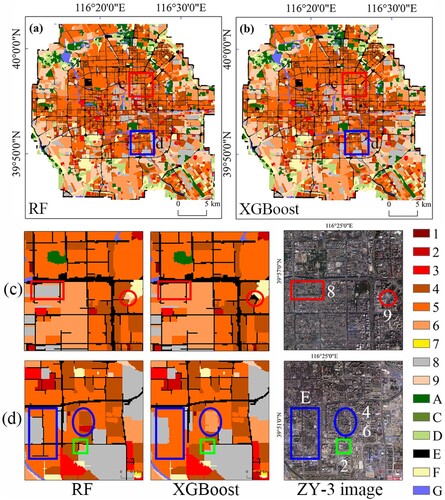
Table 8. Comparison of land cover classification accuracy using the RF classifier and different feature combinations.
Figure 9. Three representative examples of classification details used 2D USP + 3D USP (produced by along- and across-track modes) + NTL, 2D USP + 3D USP (produced by single along-track mode) + NTL, and 2D USP + 3D USP (produced by along- and across-track modes).
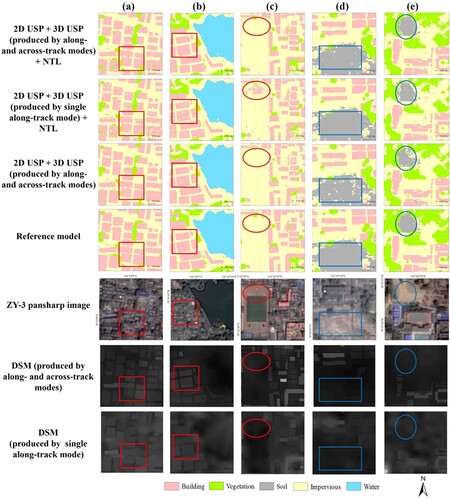
Figure 10. Comparisons of the LCZ classification results of different experiments. Exp. a is the classification experiment without 3D USPs and NTL, Exps. d and e are the classification experiments without NTL and 3D USPs. Exp. g is the classification experiment using 3D USPs and NTL.
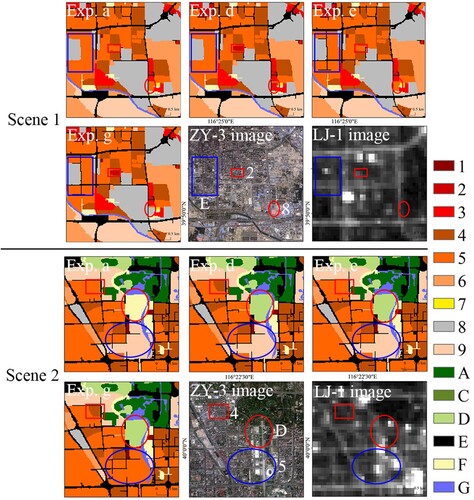
Table 9. Comparisons of the existing methods for LCZ mapping.
Supplemental Material
Download MS Word (6.1 MB)Data availability statement
The data that support the findings of this study are available from the corresponding author upon reasonable request. Data in this study can be available within the article or its supplementary materials.