Figures & data
Figure 1. State transition diagram showing behavioural state and its corresponding duration of a robot mimics silkworm moth behaviour.
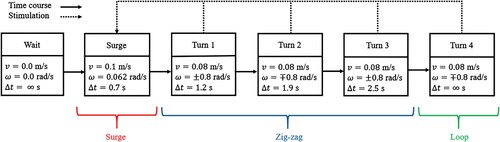
Figure 2. Experiment environment setup. (a) An indoor environment featuring an Ethanol source with a rectangular obstacle positioned at centre and (b) Odour source searching robot.
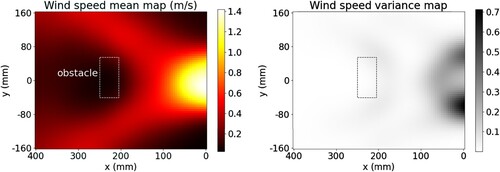
Figure 3. Wind speed distribution maps.
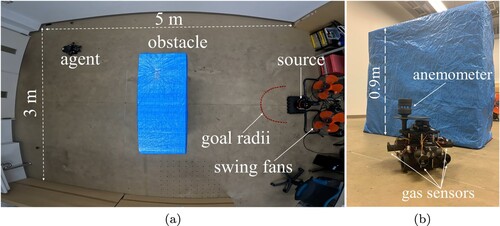
Figure 4. Comparison of trajectories: utilizing PD Method (20 cases) versus RPD method (20 cases).
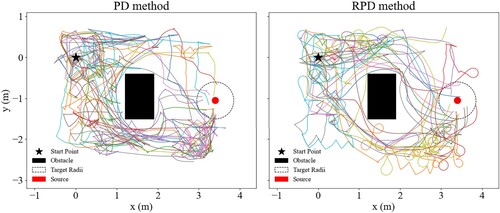
Table 1. Comparative analysis: success rate, search time, and travelled distance of odour source search robot employing PD method (20 trials) versus RPD method (20 trials).
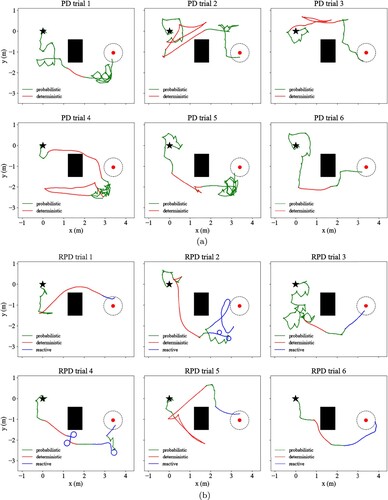
Figure 5. Differences in trajectories and movement patterns of agent finding odour source using PD method compared to RPD method. (a) Example trajectories of an agent using PD method and (b) Example trajectories of an agent using RPD method.