Figures & data
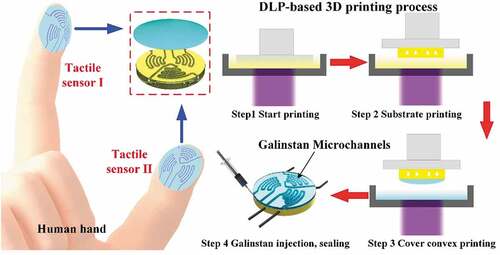
Figure 1. (a) Schematic view of flexible tactile sensor worn on hand index and thumb fingers; (b) two-layered structure of the sensor and fingerprint-patterned microfluidic channels with embedded galinstan liquid metal; (c) temperature and contact force sensing principles
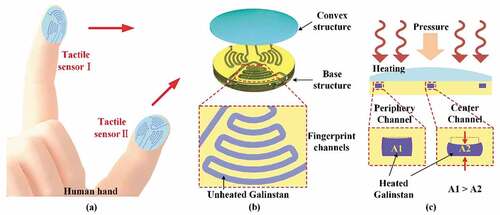
Figure 2. Fabrication process of the tactile sensor: (a) start printing; (b) printing the substrate layer with microfluidic channels; (c) printing the cover convex structure; (d) galinstan injection and sealing
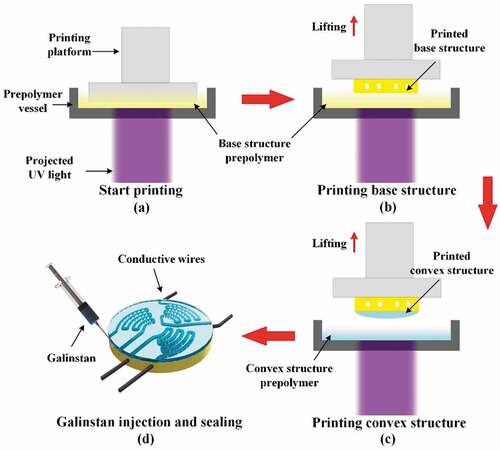
Figure 3. (a) Photograph of the printed tactile sensor; (b) final fabricated tactile sensor after sealing; (c) schematic view of the sensing circuit for temperature and force sensing
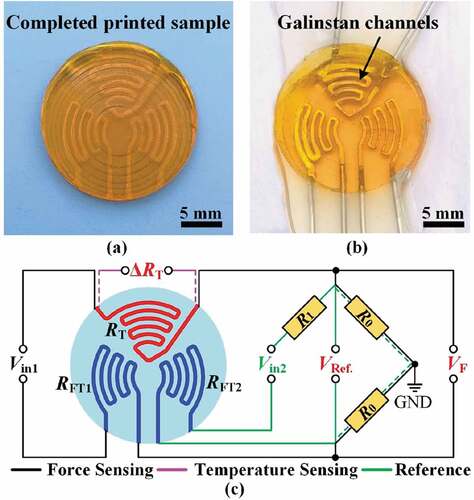
Figure 4. Photograph of the tactile sensors worn on fingertips for force and temperature sensing when grasp a beaker of water
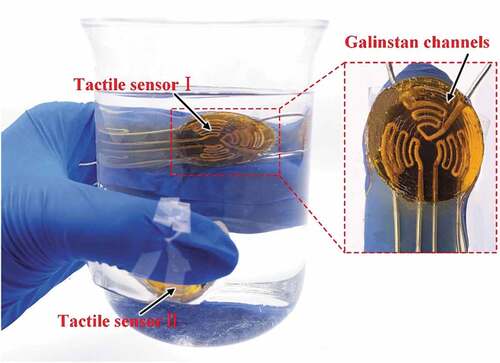
Figure 5. Calibration results of the tactile sensor: (a) force sensing range from 0 to 10 N and (b) temperature sensing range from 20°C to 80°C
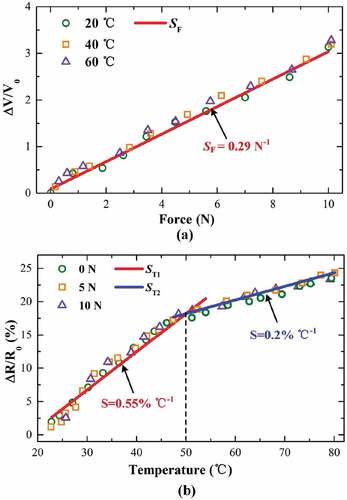
Figure 6. Sensing performance of the tactile sensor: (a) resistance change under different loading forces; (b) resistance change under different loading frequencies; (c) 200 cyclic loading and unloading tests; (d) cyclic heating and cooling tests
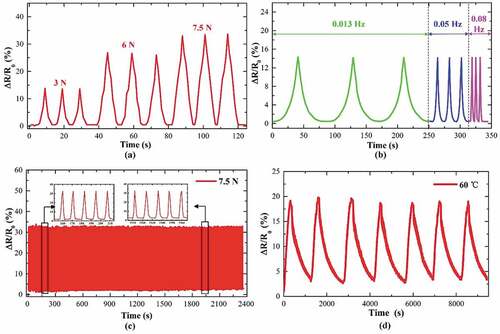
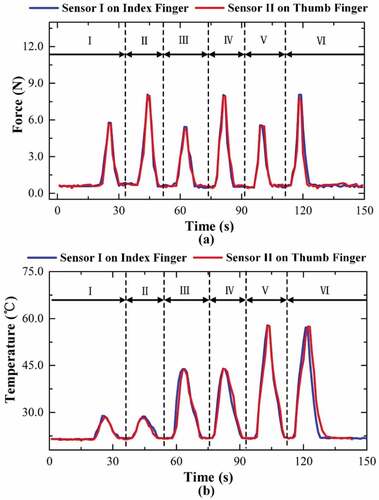
Figure 7. The measured results during hand grasping: (a) the measured forces and (b) temperature curves of Sensor I and Sensor II on index and thumb fingers