
Figures & data
Figure 1. Flow chart of the method for predicting the direction and trajectory of the main slide in a landslide subregion.
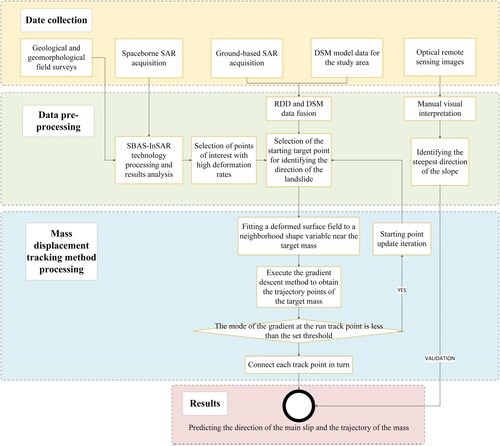
Figure 2. (a) Time–position of Sentinel-1A image interferometric pairs; (b) time–baseline of Sentinel-1A image interferometric pairs. (The yellow point denotes the supermaster image. Blue lines represent interferometric pairs. Green diamonds denote slave images.).
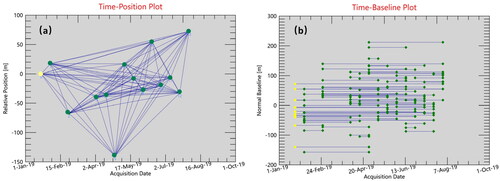
Figure 3. Schematic diagram of RDD and DSM data fusion. (a) 3 D model of the GB-InSAR system observation geometry; (b) GB-InSAR plane geometry model in a range–azimuth coordinate system.
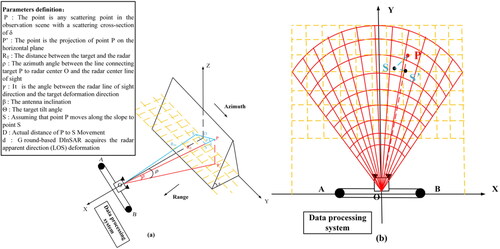
Table 1. Detailed parameters and fitting results of the model.
Figure 4. Location and shape of the Hongshiyan landslide: (a) Map of the Hongshiyan landslide; (b) presliding and postsliding images for the landslide based on GF-1; (c) after the Ludian earthquake on 5 August 2014; UAVs took aerial photos of the landslide; (d) schematic diagram of area division.
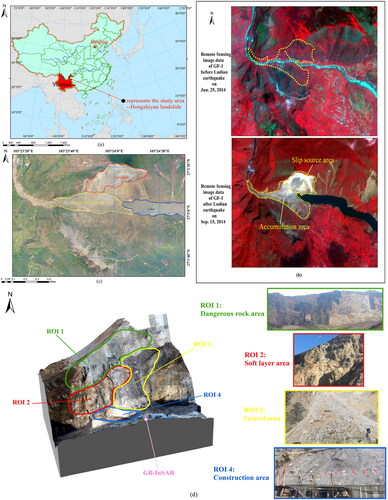
Table 2. The parameters of the M600-Pro-type UAV and Zenmuse-X5 camera lenses.
Table 3. Equipment technical index.
Figure 5. Monitoring-area radar images (left, middle) and UAV image (right).

Figure 6. (a) and (b) Deformation rate map (LOS direction) from January 2019 to August 2019; (c) deformation rate map (slope direction) from January 2019 to August 2019; (d) deformation rate map (vertical direction) from January 2019 to August 2019.
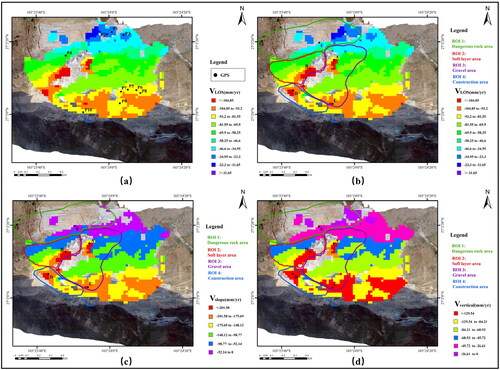
Table 4. SBAS-InSAR versus GPS monitoring data validation (mm/yr).
Figure 7. Cumulative displacement map of GB-InSAR campaigns.
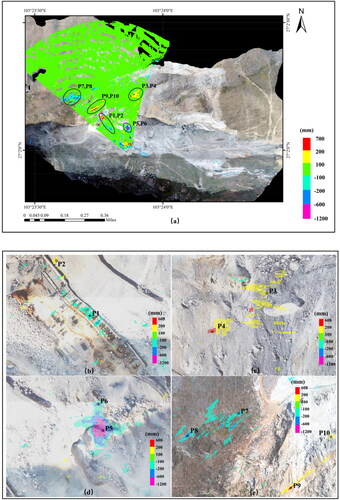
Figure 8. Response of SBAS-InSAR time-series deformation results to rainfall for typical feature points A, B, C, D, and E.
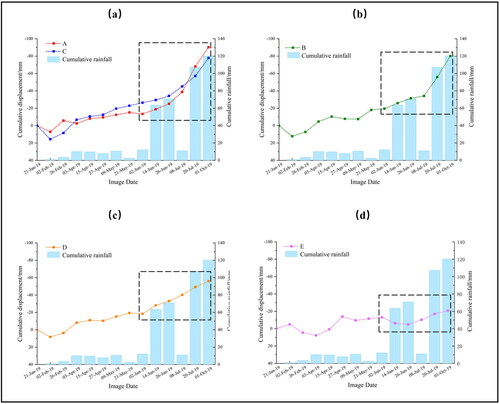
Figure 9. Cumulative deformation curves (a–f) and displacement velocity versus curves (a’–f-) over time at typical monitoring features.
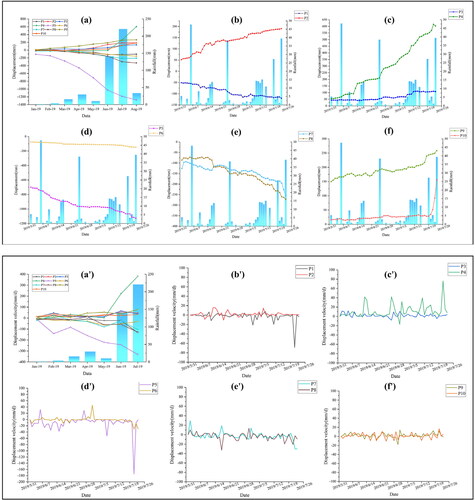
Figure 10. Results of deformation surface field fitting. (a) 3 D scatter plot of the deformation region; (b) schematic of the real deformation region; (c) 3 D smoother fit of the regional deformation field; (d) regional deformation surface field fitted with the Lorentz2D function.
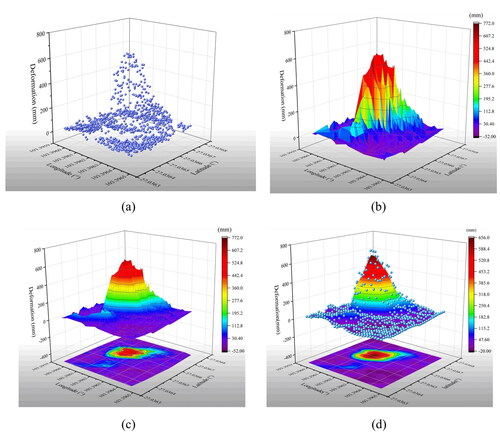
Figure 11. (a) Fitted deformation surface field contours and target starting point maps; (b) predicted main slip direction and displacement trajectory maps.
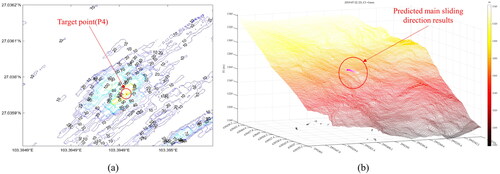
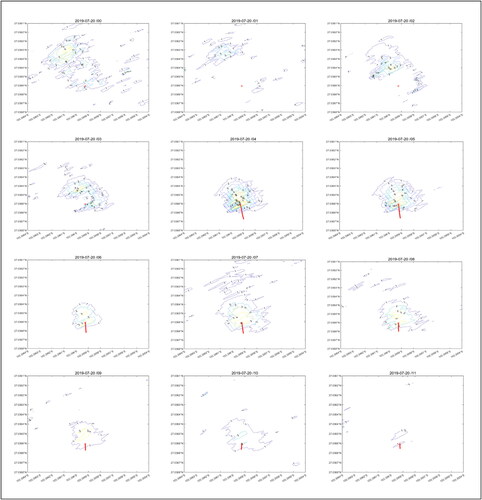
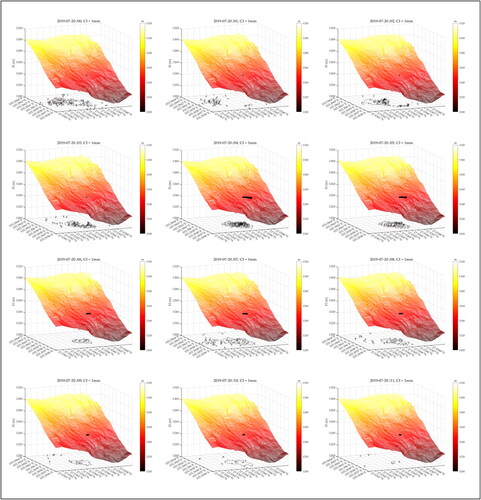
Figure 13. General drawing of displacement tracking and trajectory prediction of 0–12 points on July 20, 2019.
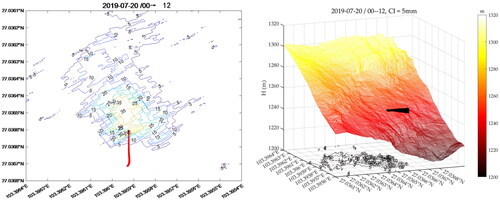
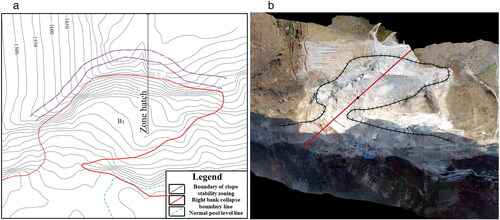
Figure 14. (a) Diagram of the slope stability zone of the right bank collapse; (b) schematic diagram of the main sliding direction of the landslide obtained by the empirical method.
Data availability statement
Self‐collected datasets that support the findings of this study are available from the corresponding author upon reasonable request.