Figures & data
Table 1. Parameters of the underwater vehicle.
Table 2. Hydrodynamic derivatives and damping terms.
Figure 1. Simulation results using GVC for underwater vehicle: (a) linear velocity errors; (b) angular velocity errors.
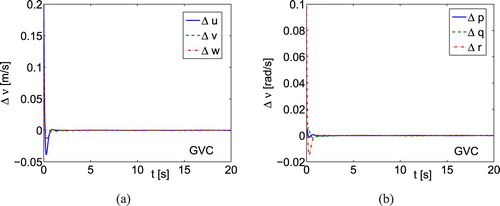
Figure 2. Simulation results using the classical (CL) controller for underwater vehicle: (a) linear velocity errors; (b) angular velocity errors.
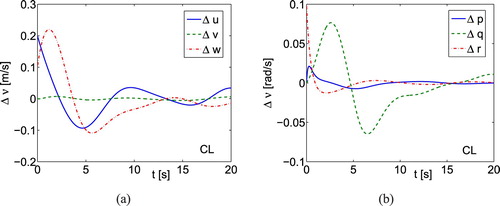
Figure 3. Simulation results using GVC for underwater vehicle: (a) lumped dynamics estimation errors related to linear velocities; (b) lumped dynamics estimation errors
related to angular velocities.
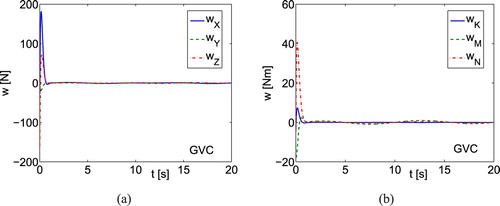
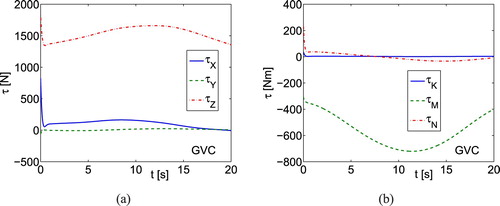
Figure 4. Simulation results using GVC for underwater vehicle: (a) the quantity time history related to linear velocities; (b) the quantity
related to angular velocities.
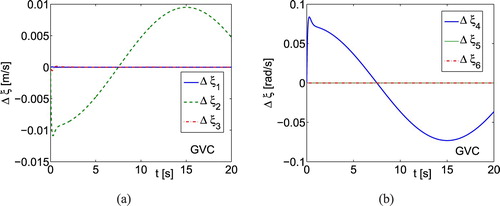
Figure 5. Simulation results using GVC for underwater vehicle: (a) the quantity time history related to linear velocities; (b) the quantity
related to angular velocities.
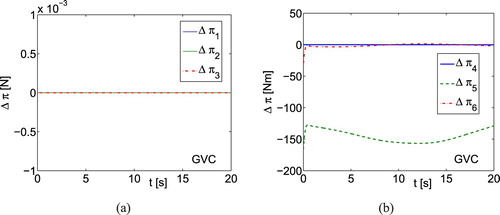
Figure 6. Case 2: simulation results using (Equation29(29)
(29) ) controller for underwater vehicle: (a) linear velocity errors; (b) angular velocity errors; (c) lumped dynamics estimation errors
related to linear velocities; (d) lumped dynamics estimation errors
related to angular velocities; (e) control forces τ; (f) control torques τ.
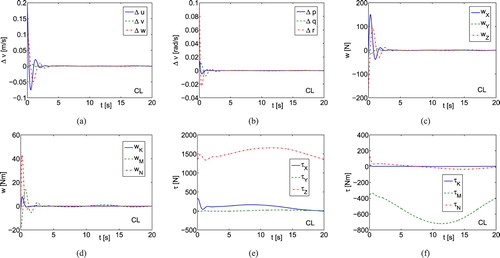
Figure 7. Case 2: simulation results using GVC for underwater vehicle: (a) control forces τ; (b) control torques τ.