
Figures & data
Figure 1. Virtual unmanned vehicle interaction platform of AirSim (Shah, Dey, Lovett, & Kapoor, Citation2018)
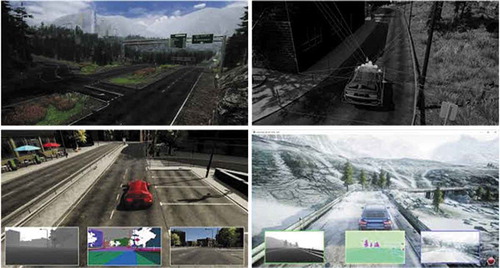
Figure 2. The operation interface of ocean scene image data collection based on Unity3D
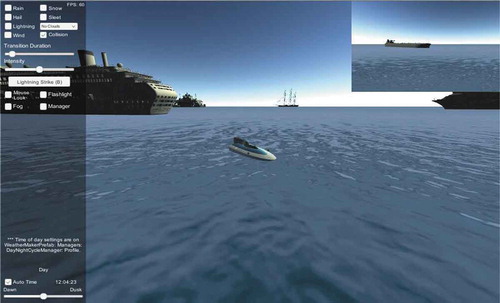
Figure 3. Image data collection of ocean scenes on sunny, dusk and cloudy days. The image includes a variety of ships with obvious light changes. These image data samples are difficult to obtain in real scenario
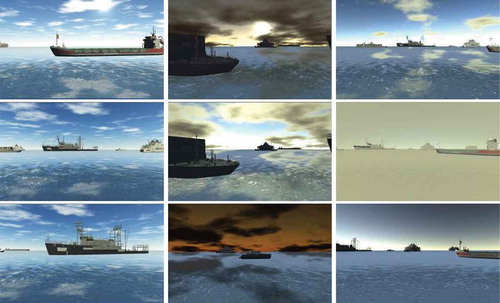
Table 1. Data collected in different scenes at different time
Table 2. The number of different types of ships collected datum under different weather conditions
Figure 4. Major components of the unmanned surface vessel
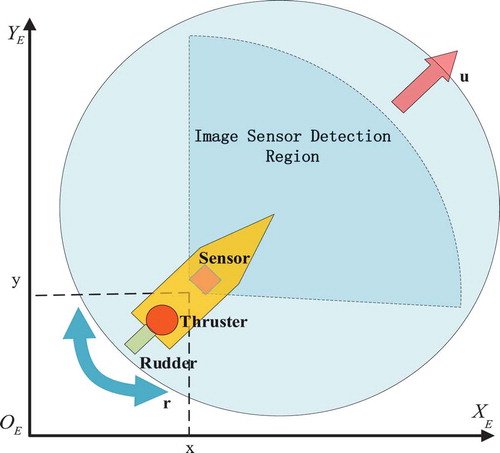
Table 3. The control commands of USV
Figure 5. Typical application scenarios in Unity3D ML-Agents toolkit
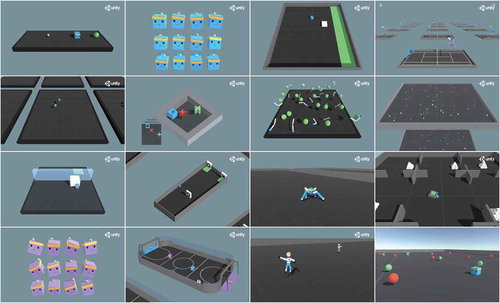
Table 4. The proportion of diverse weather conditions in PASCAL VOC dataset
Table 5. Compare the accuracy of boat class with/without 500 virtual ocean scenes data on Pascal 07 and Pascal 07 + 12 dataset. The virtual ocean scenes images are collected in Unity3D
Figure 6. POMDP modeled USV obstacle avoidance overall pipeline
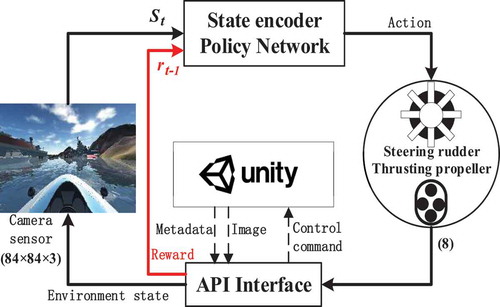
Figure 7. Comparison among the results using our VURLOA algorithm, random policy and CDRLOA algorithm (Cheng & Zhang, Citation2017) average sailing speed during the USV obstacle avoidance training
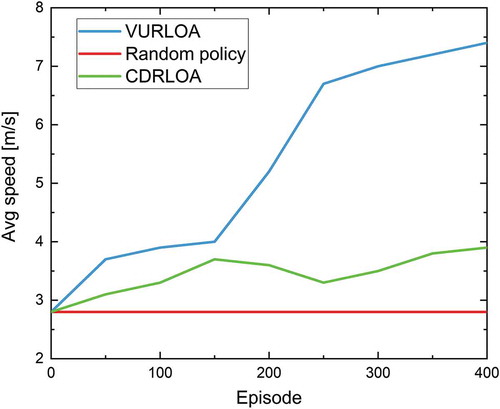
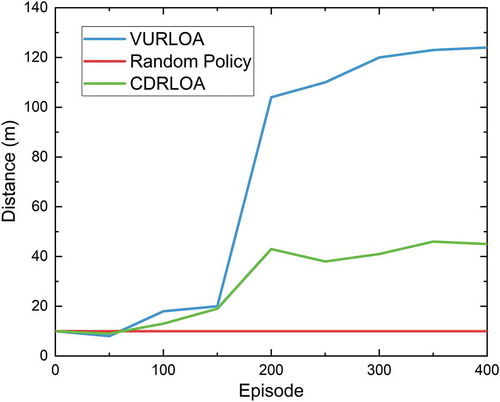
Figure 8. Comparison among the results using our VURLOA algorithm, random policy and CDRLOA algorithm (Cheng & Zhang, Citation2017)
Data availability statement
The data referred to in this paper is not publicly available at the current time.