Figures & data
Figure 1. Dynamical model of MEMS z-axis gyroscope.
Figure 2. Membership functions (a) sliding surface, (b) derivative of sliding surface and (c) reaching control.

Figure 3. Membership functions (a) error, (b) rate of error and (c) reaching control gain.

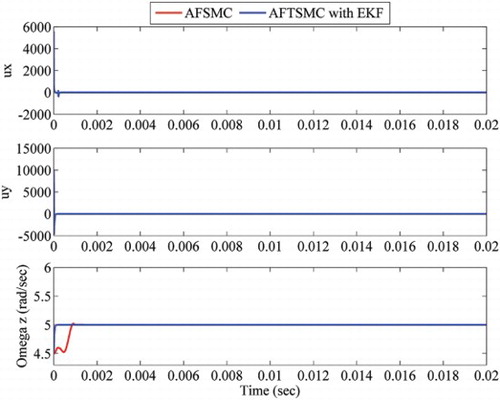
Figure 4. Control forces by AFTSMC and comparison of adaptations by AFSMC and AFTSMC with EKF.