Figures & data
Figure 1. System output, control signal and sliding surface for Example 1. (a) System output. (b) Control signal. (c) Sliding surface.
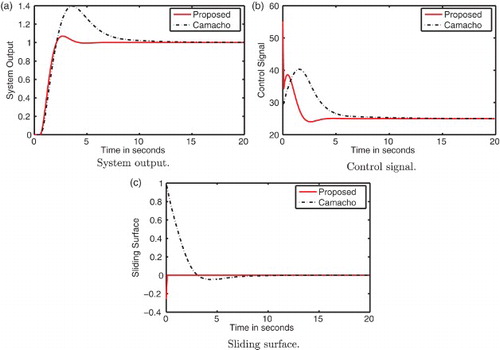
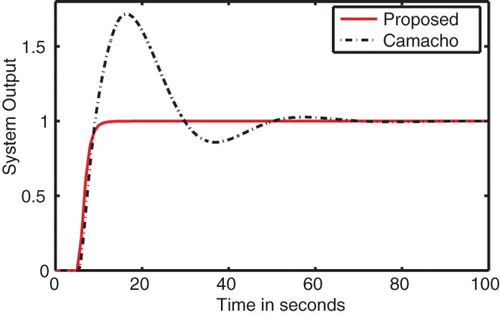
Figure 2. System output for Example 1 under 20% uncertainty.
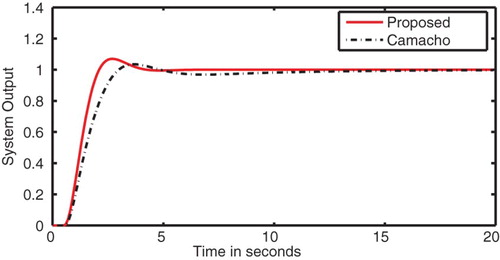
Figure 3. System output, control signal and sliding surface for Example 2. (a) System output. (b) Control signal. (c) Sliding surface.
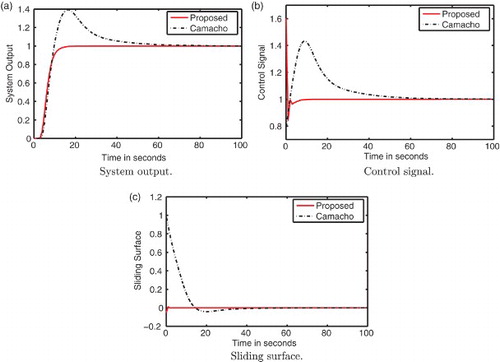
Figure 4. System output for Example 2 under 20% uncertainty.
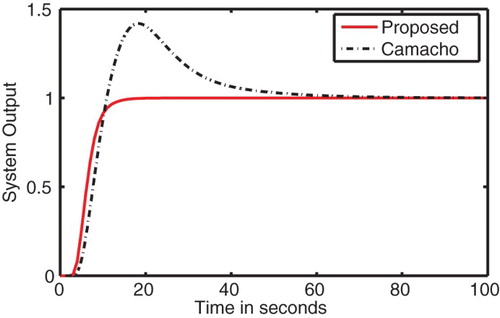
Figure 5. System output, control signal and sliding surface for Example 3. (a) System output. (b) Control signal. (c) Sliding surface.
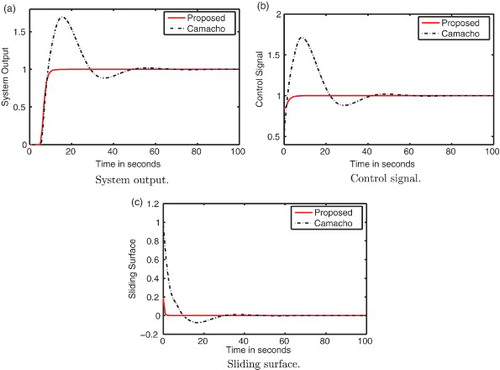
Figure 6. System output for Example 3 under 20% uncertainty.