Figures & data
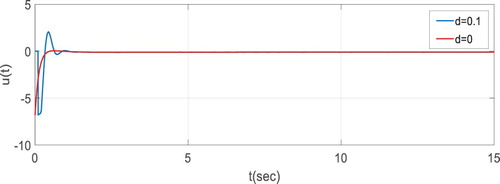
Figure 1. Input control signals.
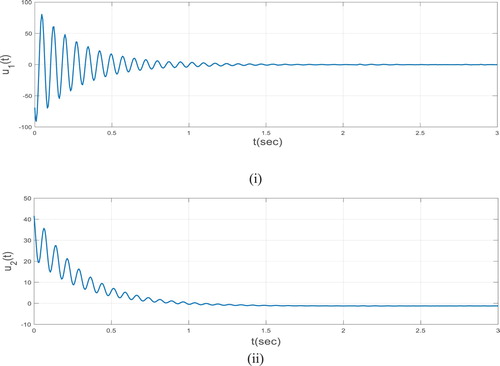
Figure 2. State trajectory of d-axis current (with control–without control).
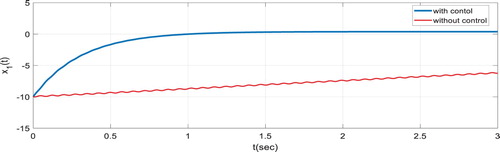
Figure 3. State trajectory of q-axis current (with control–without control).
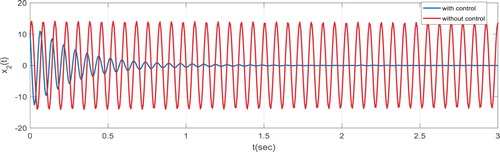
Figure 4. State trajectory of rotational speed (with control–without control).
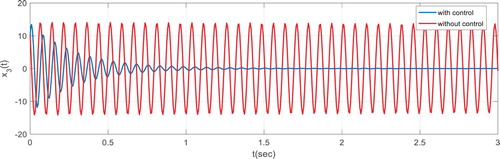
Table 1. WECS parameters.
Figure 5 Time behaviour of the disturbance.
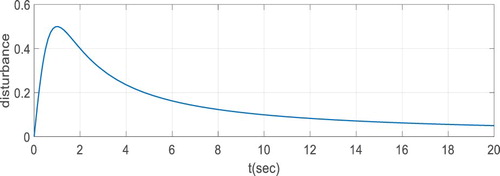
Figure 6. Time behaviour of state system.
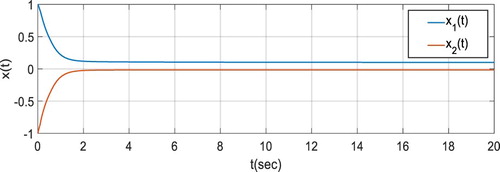
Figure 7. Time behaviour of control input.
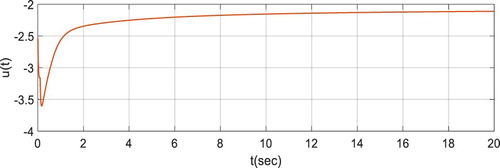
Figure 8. Time behaviour of states of system for two difference time delay.
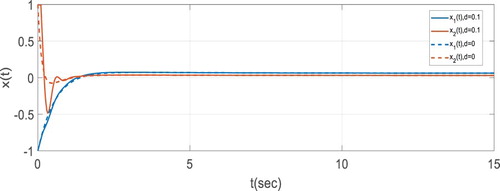
Figure 9. Comparison of control input for two difference time delay.