Figures & data
Figure 1. The trajectories of and its estimations.
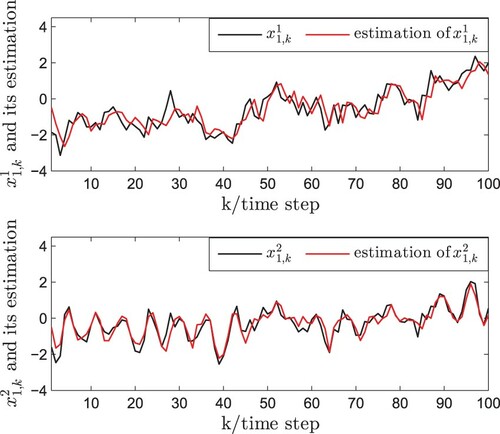
Figure 2. The trajectories of and its estimations.
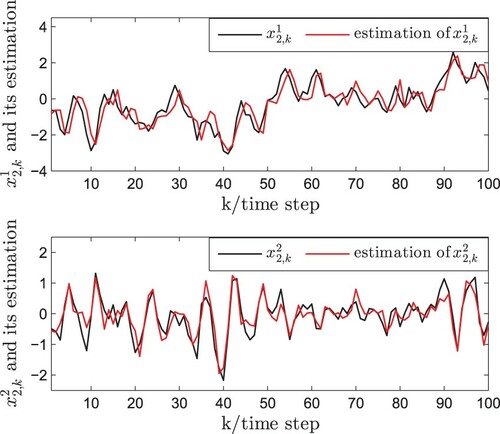
Figure 3. The trajectories of and its estimations.
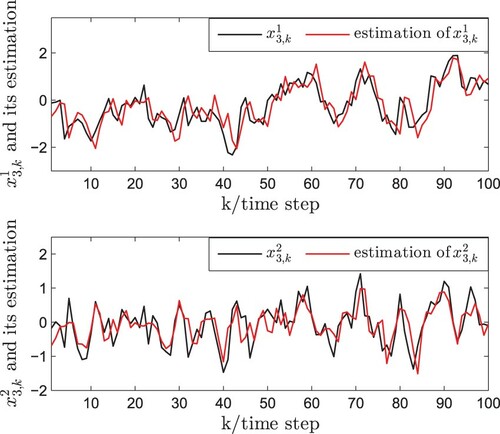
Figure 4. The trajectories of and its estimations.
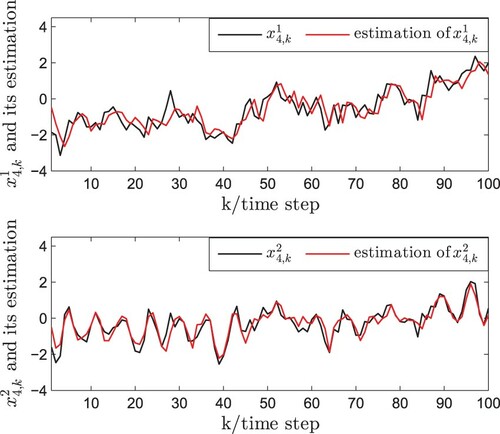
Figure 5. The trajectories of and its estimations.
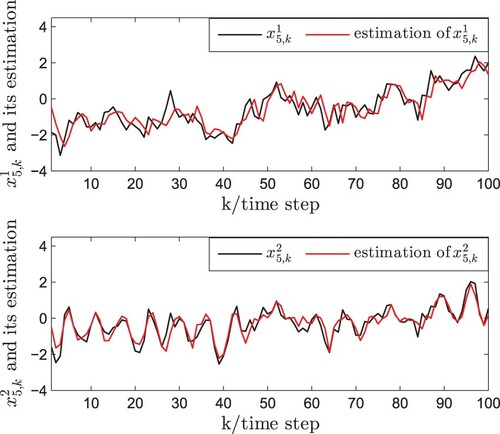
Figure 6. log(MSE) with measurement outputs and corresponding upper bounds.
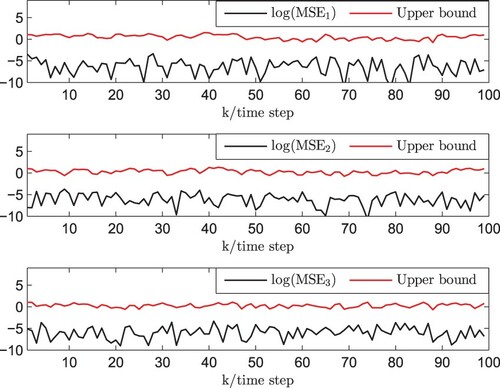
Figure 7. log(MSE) without measurement outputs and corresponding upper bounds.
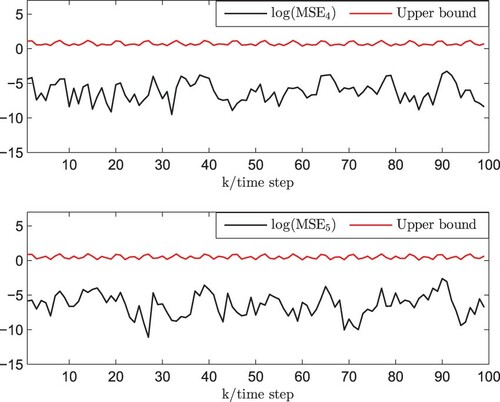
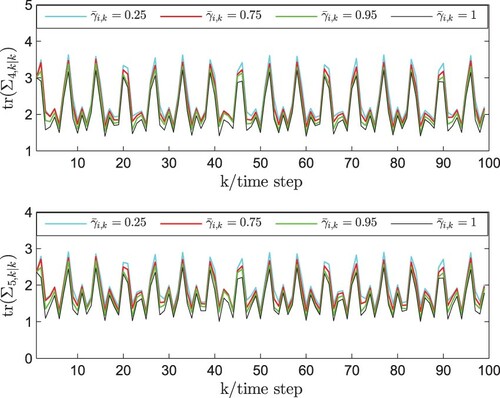
Figure 8. with measurement outputs under different probabilities (
).
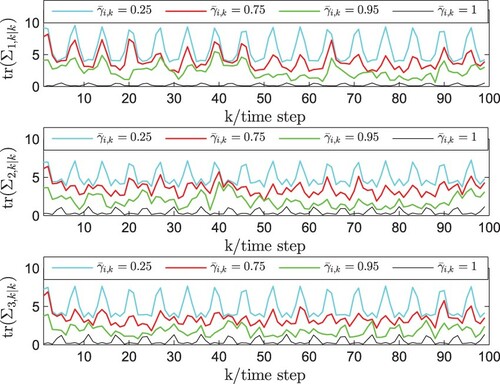
Figure 9. without measurement outputs under different probabilities (
).