Figures & data
Figure 1. Triggered instants.
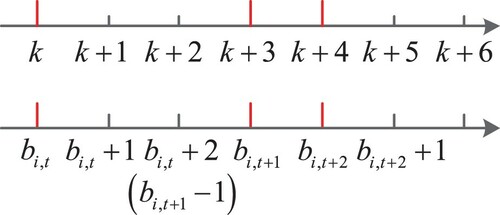
Figure 2. State and its estimate (node 1).
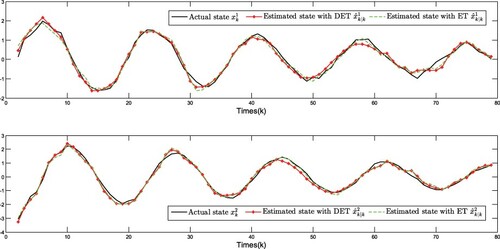
Figure 3. State and its estimate (node 2).
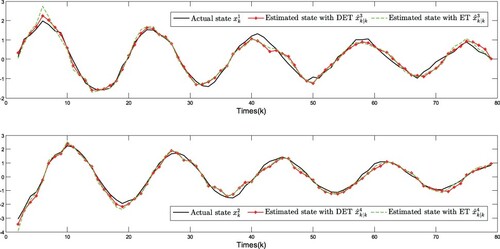
Figure 4. State and its estimate (node 3).
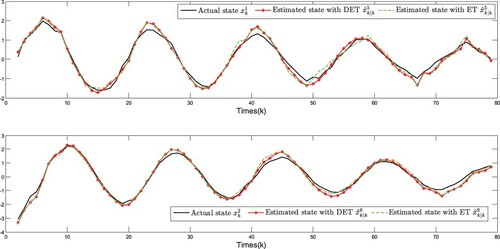
Figure 5. Event release instants of ETS.
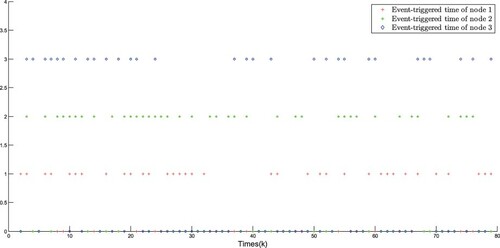
Figure 6. Event release instants of DETS.
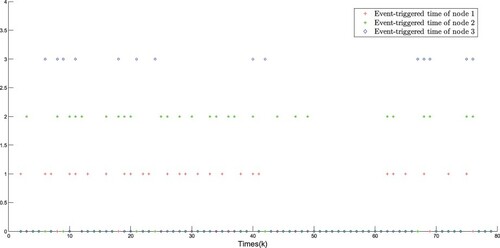
Figure 7. with and without RSS for node 1.
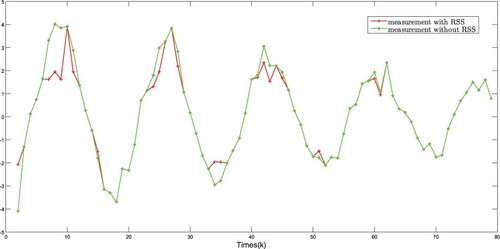
Figure 8. with and without RSS for node 2.
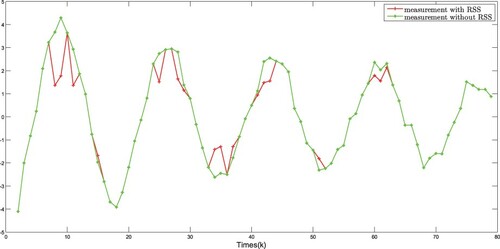
Figure 9. with and without RSS for node 3.
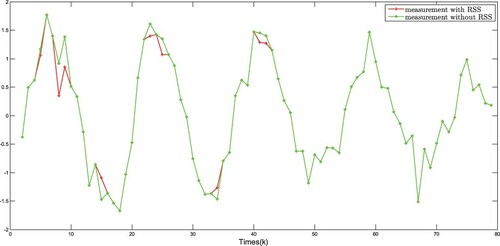
Figure 10. Trace of and its upper bound
.
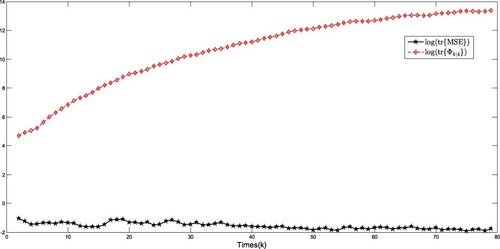
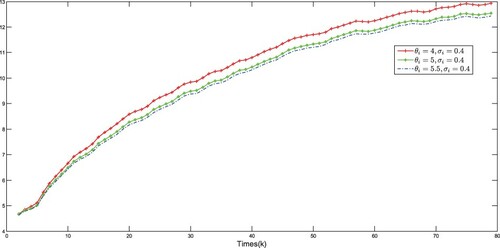
Figure 11. Traces of the upper-bound with different triggered parameters.