
Figures & data
Figure 1. Schematic diagram of the leader-following framework.
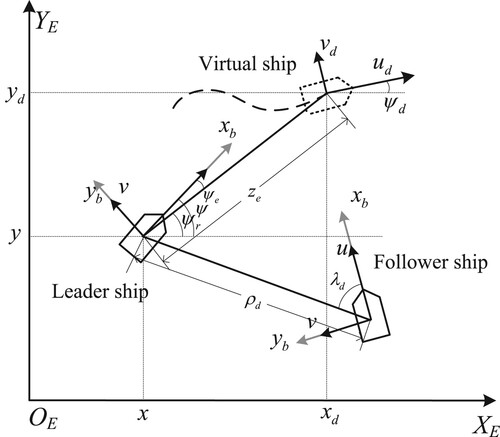
Table 1. Model parameters of the considered underactuated surface vehicles.
Figure 2. Trajectory of formation under the 2D plane.
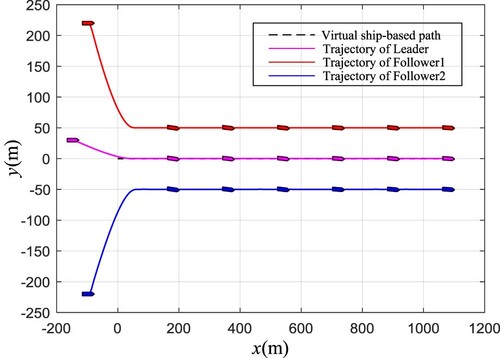
Figure 3. The velocity values of USVs under the proposed algorithm.
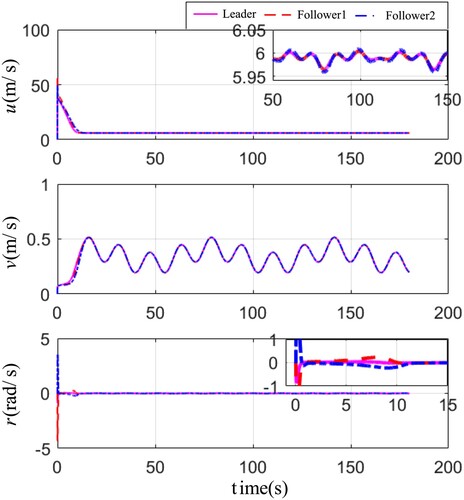
Figure 4. The tracking errors of USVs of the proposed algorithm.
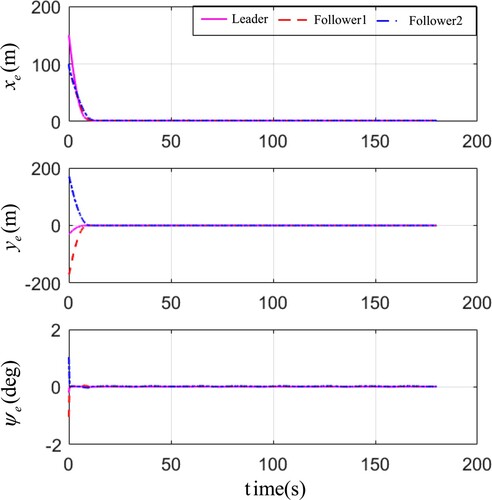
Figure 5. The control efforts of the proposed algorithm.
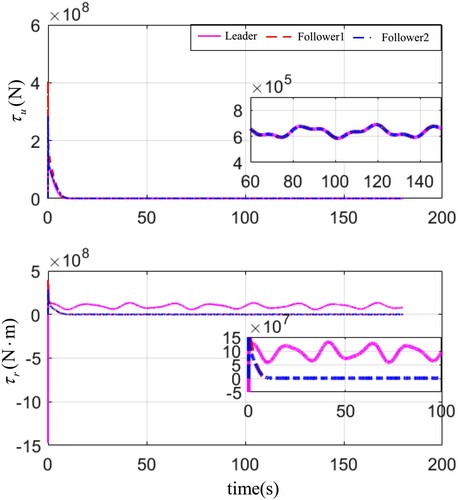
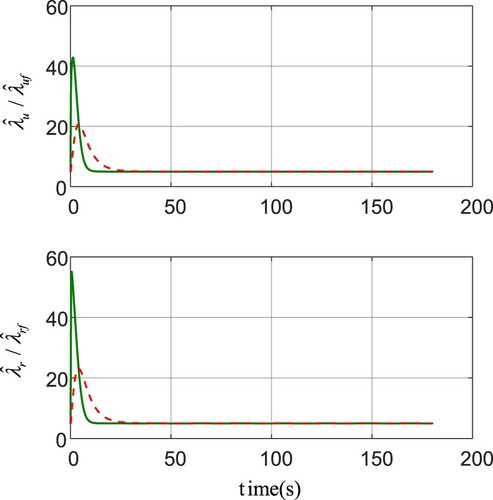
Figure 6. The adaptive laws: ,
(dashed line) and
,
(solid line).
Data availability statement
The data that support the findings of this study are available from the corresponding author, Guoqing Zhang, upon reasonable request.